Nominalni napon jedne 18650 litij-ionske ćelije je 3,6-3,7 V. Potpuno napunjena ćelija proizvodi 4,1-4,2 V. Ali s minimalnim naponom to je teže - konačni napon pražnjenja ovisi o vrsti baterije i ova brojka može fluktuiraju unutar 2,6-3,2 V. Možete prazniti i niže, ali to je siguran put do brze degradacije baterije. Odlučio sam pooštriti procjenu napona koji proizvodi baterija s rasponom nominalno-maksimalnih. Tada se ispostavlja da sklopovi od dvije, tri i četiri uzastopne baterije daju raspone od 7,2-8,4 V, 10,8-12,6 V, 14,4-16,8 V. Iz takvog sklopa trebamo dobiti dva napona - neki napon za napajanje motora i 5 V za napajanje elektronike. Moguće je napajati motore na 6 V sa sklopom s dvije baterije pomoću DC/DC buck pretvarača, ali razlika između minimalne vrijednosti napona (kada se baterija isprazni do nominalnog bit će 7,2 V) i 6 V će biti reda veličine 1,2 V, što može biti nedovoljno za stabilan rad DC/DC buck pretvarača - kako bi se izbjegli problemi, potrebno je imati razliku napona između njegovog ulaza i izlaza od najmanje 2 V ( zapravo, možda će biti manje za pretvarače s malim prekidom, ali nećemo se fokusirati na njih). Sklop od tri elementa je sasvim prikladan za nas, potrebne napone ćemo dobiti korištenjem step-down DC / DC pretvarača. Motori se mogu napajati i na 9V, tada ćemo u najgorem slučaju dobiti razliku od 1,8V, što bi trebalo biti sasvim dovoljno. Prikladan je i sklop od četiri elementa, ali morate razumjeti da je dodatna baterija višak kilograma a prostor zauzet, iako visok energetski intenzitet cijele baterije.
Drugi način organiziranja napajanja je korištenje paralelnih veza istih baterija i DC/DC pojačivača. Zatim, s 3,6-4,2 V, napon se može povećati na 5 V za elektroniku i do 6-9 V za motore. Čini se da se kapacitet takvog sklopa baterija može lako mijenjati dodavanjem novih ćelija, ali ne zaboravite da korištene baterije moraju imati sličan kapacitet i unutarnji otpor.
Postoje posebne upravljačke ploče za punjenje/pražnjenje serijskih ili paralelnih baterija. Zaštitni regulatori štite sklop akumulatora od prekomjernog punjenja ili pražnjenja (kontrola napona), kratkog spoja, prekoračenja dopuštene struje pražnjenja. Kada koristite takve jednostavne ploče, potrebno je vanjsko napajanje s ograničenjem struje punjenja. Kontroleri punjenja/pražnjenja mogu samostalno puniti baterije cc/cv metodom s ograničenjem struje punjenja. Napredni kontroleri za serijsko spajanje baterija također mogu osigurati individualno punjenje za svaku bateriju - balansiraju ćelije baterije.
Odabrao sam serijsku shemu povezivanja baterije koristeći zaštitnu ploču i vanjski punjač. U budućnosti se takva jednostavna upravljačka ploča može zamijeniti balansiranim regulatorom punjenja. Iako balansiranje nije potrebno s paralelnom vezom, mora se imati na umu da ako je jedna baterija jako istrošena, kontroler to neće moći detektirati i to može biti bremenito nečim. Također je vrijedno uzeti u obzir činjenicu da će načini rada svake baterije biti različiti. Na primjer, pri uklanjanju istog napajanja, baterije u paralelnoj vezi morat će dati više struje nego u paralelnoj vezi.
Stoga su prikladni motori s nazivnim naponom od 6 V i radnim rasponom od 3-9 V. Odabrao sam motor s brzinom od 281 o/min i potrošnjom, u stanju mirovanja, od 80 mA. Pod opterećenjem, brzina pada na 238 o/min, struja se povećava na 380 mA, dok motor proizvodi 2 W snage i razvija okretni moment od 0,5 kg * cm. Kada je motor zaustavljen, okretni moment se povećava na 4 kg * cm, a struja na 900 mA. Sve ove karakteristike su preuzete s tablice objavljene na web stranici jednog od prodavača robe, budući da nisam mogao pronaći normalan "datasheet".
Sklop trupa i podvozja
Naručio sam sljedeće motore.
Ako pogledate fotografiju, možete vidjeti igle na osovinama koje strše iz motora. Za ove motore pronađen je set spojnica i kotača.

Kotači promjera 80 mm, mekana guma, s čavlima.


Samu bazu sam namjeravao napraviti od širokih aluminijskih kutova (ili nečeg sličnog što se može naći u željezarama) s kojim ću napraviti “bočni” okvir koji se zatvara nekim laganim, izdržljivim, metalnim pločama. Na pravim mjestima se buše rupe i po potrebi se režu navoji. Međutim, prvo sam odlučio potražiti što kineska industrija nudi. I pronašao sam komplet - šasiju za izradu robota, koja je sadržavala samo tijelo, gore spomenute motore, spojke i kotače, kao i pretinac za baterije AA, prekidač za napajanje, utičnicu i pričvrsne elemente. Samo kućište ima mnogo rupa, što ga logično čini lakšim, a njihova prisutnost trebala bi minimalizirati količinu bravarskih radova.


Procijenivši dimenzije i volumen unutarnjeg prostora (paralelno je odabrana elektronika za platformu, koja je u ovom slučaju morala stati), naručio sam ovaj komplet. Na motorima koji su stigli, kao što vidite gore, iz nekog razloga piše JGA25-370-9v-281rpm. Zašto baš 9v, kada je denominacija ove podskupine 6 V, nisam razumio, ali, vjerojatno, Kinezi bolje znaju što napisati kako bi se bolje prodali.
Sama kutija je teška gotovo 400 grama. Od kojeg je materijala, teško mi je odgovoriti, ali ne izgleda kao čisti aluminij.




Skinite poklopac i ugradite motore. Rupe za motore imaju promjer samo za vijke M3, nema margine za podešavanje položaja, ali, moramo odati priznanje, to nije izazvalo probleme - rupe se jasno podudaraju s navojima na kućištu motora.



Ugrađujemo spojnice.


I zavrti kotače.


Rezultat je bila gotova platforma s razmakom od tla od oko 23 mm.

Težina šasije "u praznom hodu" bila je nešto veća od kilograma. Sjećate se slika s mjerenjem mase pojedinih dijelova? 393+(58+85+20)*4 = 1045 grama. Cijeli sklop teži 1057 grama. 12 grama dodalo je 16 vijaka.

Evo jedne takve ispadne, prilično lijepe platforme.

Dijagram ožičenja
Ovdje je vrijedno objasniti važna točka zašto baš ovaj kit. Činjenica je da ako sami napravimo slučaj, onda se njegov unutarnji volumen može učiniti proizvoljnim. Kupljena futrola nam osigurava strogo fiksiran volumen u koji sve mora stati. U idealnom slučaju, postoji i preostala margina. To se mora uzeti u obzir u početku i razumjeti: hoće li potrebno punjenje stati u ovom konkretnom slučaju ili ne, te će biti potrebno ili promijeniti elektroniku ili odabrati drugi slučaj. Unutar kućišta bit će ugrađeni: motori, baterija, drajver za motore, strujna ploča, na kojoj će se također nalaziti neka vrsta elektronike - isti pretvarači napona.Čini se da je jasno što ćemo točno imati unutra. Ali kako će se sve to povezati? Ako imate ideju, ali ne možete stvoriti njen imidž, nemate ideju. U elektronici se ispostavlja da bi trebale postojati dvije slike - vizualna, koja je već prilično zamišljena, i električna (zapravo postoji i ona algoritamska - kada se opisuje ponašanje uređaja, zbog njegove hardverske i/ili softverske (funkcionalnost firmvera) mogućnosti).
Provodim puno vremena putujući na posao. Općenito govoreći, uz pravi pristup, dugo putovanje može se pretvoriti u plus čitanjem knjiga, gledanjem/slušanjem popularno-znanstvenih programa ili audio knjiga koje nikada ne biste čitali, slušali ili gledali. Zahvaljujući takvim uvjetima postao sam obožavatelj i slušao sve priče modela za sastavljanje (tako da nije bilo pitanja u komentarima -). Robot-blud nije bio iznimka, a ja sam smislio i nacrtao koncept platforme na cesti.
Dijagram je nacrtan u OneNoteu. Slika se može kliknuti. Da, sram me - sklopna shema izgleda neprincipijelno. Posljednja tri tjedna nisam se uspio posvetiti finom ugađanju članka, a već se postavilo pitanje - uopće nešto objaviti ili odgoditi “za kasnije”. Odlučio sam to objaviti na ovaj način, inače “za kasnije” može biti bremenito. Nacrtat ću normalne sheme - zamijenit ću slike. S druge strane, ovaj dizajn izgleda u stilu originalnog DIY-a. Na poslu ili kod kuće, kada se formira ideja, prvo se uzimaju obični list papira i obična olovka ...
Pogledajmo koncept što i s čime ćemo povezati. Na kontroler litij-ionske baterije D1 spojene su tri baterije 18650. Cijeli krug ima “zajedničku masu”, na koju je spojen izlaz P-kontrolera D1. Izlaz P+ je preko osigurača FU1 i sklopke SW spojen na ulaze DC/DC pretvarača D3 i D4. Pretvarač D3 stvara napon za motore, D4 - za napajanje cjelokupne elektronike. Izlazi ovih pretvarača spojeni su na pokretač motora D5, na koji su spojeni motori. Motori ML1, ML2 s lijeve strane spojeni su na MA kanal, a MR1, MR2 s desne strane su spojeni na MB kanal. Pogon je dvokanalni, što znači da će biti moguće upravljati dvije grupe motora (kanali A i B), ali ne pojedinačno za svaki motor. Priključci ENA, ENB, IN1-IN4 dizajnirani su za kontrolu brzine i smjera vrtnje motora. Otporni sklop koji generira napon Vbat' odabran je tako da u rasponu od 0 ... 5 V formira telemetriju napona Vbat baterije. Ako je Vbat = 13V (što ne bi trebao, budući da baterija može isporučiti maksimalno 12,6V, ali ja sam malo siguran), tada je Vbat' = 3,94V (to jest, vrijednost zajamčeno neće prelaziti granica od 5V). Struja koja teče kroz otpornički krug na 12 V bit će 3,6 mA, a smatrao sam te gubitke prihvatljivim (oko 0,1% s kapacitetom baterije od 3000 mAh). Utičnica za vanjsko napajanje spojena je na ulaz kontrolera D1. Ali, iz dijagrama vidimo da je spojen preko releja D2.
Prvo, želim objasniti prisutnost otpornika od 10 kΩ, koji povlači jedan od pinova u konektoru za napajanje na napon od 5 V. Imamo konektor za napajanje s tri izlaza. Par izlaza nosi napon napajanja. Treći izlaz je informativni. Kratko se spaja na negativni izlaz (mi smo spojen na masu) ako nema utikača u utičnici i otvara se ako je utikač utaknut u utičnicu. Tako dobivamo Vinon' telemetrijski signal o priključku napajanja: ako je Vinon' = 0, onda vanjsko napajanje nije priključeno, ako je Vinon' = 5 V, priključeno je. Otpornik od 10 kΩ povlači ovaj izlaz do 5 V. Kada je utikač spojen, struja od 0,5 mA će teći kroz otpornik, što je sasvim prihvatljivo.
Kada je vanjski izvor spojen preko normalno zatvorenog releja D2 i osigurača FU1, baterije će se početi puniti. Normalno zatvoreni relej znači da su njegovi izlazi uvijek zatvoreni i otvoreni samo kada je napon doveden na kontrolni kontakt. Zašto relej D2? Recimo da nemamo ovaj relej. Ako je napajanje bilo spojeno na platformu, ali ste ga zaboravili uključiti u utičnicu - kako ploča mikrokontrolera zna da li se baterija sada puni ili ne? Što ako je napajanje uključeno u utičnicu, ali ne proizvodi napon? Ili sve radi, ali napajanje daje samo 10V umjesto potrebnih 12V? A, ako sam takav izvor (koji daje samo 10 V) spojio na bateriju koja još nije potpuno ispražnjena i daje 11 V, kako onda da znam - tih 11 V čini bateriju (koja zapravo ne daje izvan iznad 10V) Ili vanjski izvor? Za takve situacije osmišljen je algoritam za koji je bio potreban relej. Naučit ćemo o povezivanju vanjskog izvora napajanja Vinonovom telemetrijom. Isključite relej i pogledajte Vin' telemetriju. Ako odgovara i ovaj napon je u očekivanom rasponu, uključite relej i signalizirajte proces punjenja. Ako nismo zadovoljni, ne uključujemo relej i signaliziramo kvar. Neka se procesom analize i indikacije pozabavi upravljačka ploča, a ne platforma. Da bismo to učinili, dat ćemo mu sve potrebne napone i kontrolni signal za Vinoff 'relej. Upravljački ulaz relejnog modula povlačimo kroz otpornik od 10 kΩ na 5 V, osiguravajući da je relej stalno uključen. Primjena 0 V na ovaj ulaz će deaktivirati relej.
Ali zašto, upravo, pretpotopni mehanički relej? Uostalom, možete staviti MOSFET tranzistor. Postojala je takva ideja, ali je trebalo odustati. Moderni MIS tranzistori imaju nizak otpor (desetke milliohma) u otvorenom stanju i kada teče struja od 2-5 A, na njemu neće biti jako značajnog pada napona i, kao rezultat toga, zagrijavanja - samo kućište tranzistora može rasipaju malu količinu snage čak i bez radijatora. Ali ovo je sve o shemi u kojoj će takav digitalni ključ kontrolirati spajanje izvora napajanja na pasivno opterećenje. Tranzistor stavljamo između dva izvora, zbog čega razlika napona između odvoda i izvora može biti značajna, što će dovesti do povećanog odvođenja topline i tranzistor će se jako zagrijati. Također, da biste otvorili ili zaključali tranzistor, morat ćete napraviti upravljački krug (driver), jer je razina upravljačkog napona s ploče mikrokontrolera 5 V, što nije dovoljno za stvaranje razlike napona između vrata i izvora za upravljanje tranzistorom. (za upravljanje tranzistorom, na primjer, IRFZ44N, morat ćemo primijeniti 8-12 V na njegova vrata kako bismo ih otvorili). Bilo da se radi o gotovom relejnom modulu, koji samo trebate spojiti i koji će, ako je već zatvoren, zajamčeno bez problema spojiti izlaz na ulaz.
Tako smo dobili ne samo sklopnu ploču, već i punopravnu napojnu ploču. Ploča je opremljena DC/DC pretvaračima, otpornim krugovima, osiguračem i hrpom konektora za spajanje elektronike. Strukturno se mogu razlikovati dva konektora. Konektor CON1, na koji će se spojiti baterija, prekidač / tipka za napajanje, konektor za napajanje, relejni modul, motori, upravljačka ploča motora - sve periferne jedinice unutar platforme. I konektor CON2, čija je svrha spajanje na upravljačku ploču. Ovaj konektor daje telemetrijske i upravljačke signale, napon od 5 V, a također je korisno "izbaciti" napon iz Vbat baterije - dajemo mogućnost organiziranja vlastitih kanala napajanja s različitim naponima, na primjer, 6 V za napajanje servo.
Elektronika šasije
Elektronika je odabrana paralelno s razvojem električnog kruga uređaja.
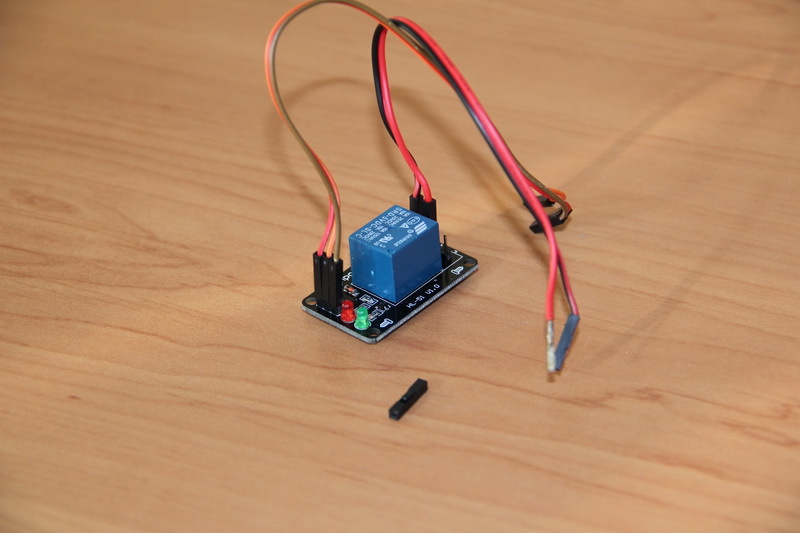
Utičnica s prekidačem je krenula na posao iz primljenog kompleta za kućište. Odabrani su i kupljeni drajver za motore baziran na čipu L298N, ploča DC/DC pretvarača XL4005, neimenovani relejni modul, pretinac za baterije i sklopna ploča dimenzija 50x70 mm i razmaka rupa od 2,54 mm.
Osim toga, trebat će nam i sljedeći materijali.

Na vrhu fotografije možete vidjeti nekoliko dugih pin konektora s nagibom od 2,54 mm, kao i utičnice, ispod - metalni kontakti na kabelu, lijevo - utičnice za njih, desno - M2 vijci, matice i podloške. Priključci na ploči i kabelu u različitim trgovinama nazivaju se različito. Iz povijesnih razloga, pin zaglavlja zovem PLS, utičnice na ploči - PBS, konektore na kabelu - BLS. Na internetu, na stranim stranicama, takvi se konektori traže upitom poput "2,54 mm konektor" ili "dupont konektor". Osim toga, trebat će vam razni potrošni materijal - lem, fluks, žice i tako dalje, kao i set ručnih alata - rezači žice, pincete, odvijači itd. - oni koji rade barem nešto DIY (uradi sam - Uradi sam).
Prije naručivanja elektronike i kućišta shvatio sam da bi odabrana elektronika bez problema stala u unutrašnjost. Vrijeme je da to provjerite: sređujemo elektroniku i označavamo buduća sjedala.


Sada krenimo s pripremom ploča.
Počeo sam s baterijom. Kontroler litij-ionske baterije je “posađen” na vruće ljepilo i na njega su zalemljeni terminali kontakata u skladu s kružni dijagram. Mislim da će čitatelje zanimati što se radilo i kojim alatom, pa sam na kraju članka, ispod spojlera, uz svoje kratke komentare stavio slike neke od korištenih uređaja. Ljepilo za topljenje naneseno je termičkim pištoljem. Međutim, prije toga sam morao poraditi na, da tako kažem, povećanju pouzdanosti ovog odjeljka. Upozorit ću sve koji će nešto poduzeti - bolje je da ne pogriješim i uzmem trajnije pretince za baterije. Takve pregrade svojedobno nikako nisam mogao naći u maloprodaji, a kad sam ih našao, zabio sam ih puno od veselja, za jednostavnost duše. I nije im tako lako. Jer u ovom odjeljku baterije s ravnim pozitivnim jastučićima koji ne strše jednostavno ne dopiru do kontakta. Osim toga, svi kontakti s oprugom se okreću, kontakt je loš. Stoga sam morao zašrafiti M2 vijke, odgristi višak, zašrafiti matice i zategnuti kako bih poboljšao kontakt. Ali ovo mi se činilo nedovoljno, a također sam temeljito zalemio sve priključke. Jer ako se nešto radi, onda mora biti pouzdano da ne bi stvaralo probleme u budućnosti i onda se više na ovo ne vraćalo.
Treba napomenuti da se za litij-ionske baterije koristi konvencionalni kontroler bez balansiranja. To znači da kada se jedna od tri baterije puni, kontroler će najvjerojatnije prekinuti punjenje svih baterija. Zapravo, ovo je samo zaštitna ploča od slabog pražnjenja i prekomjernog punjenja baterija i kontrole struje pražnjenja. Stoga je poželjno koristiti baterije istog stvarnog kapaciteta. Ako koristite regulator s balansiranjem, tada je odabir prema kapacitetu manje kritičan i baterije će se koristiti učinkovitije, ali takvi su regulatori skuplji i zauzimaju više mjesta. Kako odabrati baterije istog stvarnog kapaciteta? Uostalom, nakon što ste kupili iste baterije iz iste serije, čak i od marki, kapacitet se može razlikovati za 5-10%, a kineske baterije s natpisima od 6000-8000 mAh, općenito, su baterije nepoznatog kapaciteta. Za mjerenje stvarnih kapaciteta koristio sam punjač OPUS BT-C3100 koji je dosta popularan u mom okruženju. Pomoću njega je provjereno 12 kupljenih baterija i odabrana tri, čiji je raspon kapaciteta minimalan i ne prelazi nekoliko posto. Kapacitet baterija LG LGABC21865 deklariran je na 2800 mAh, ali je u stvarnosti kretao u rasponu od 2400-2500 mAh (testirano na struji od 700 mA).
Mala digresija u obliku refleksije. Punjač nam je izračunao kapacitet baterija, uzimajući u obzir njihovo punjenje do 4,2 V i pražnjenje, ako se ne varam za OPUS BT-C3100, do 2,8 V. U našem slučaju baterije se ne bi trebale manje prazniti od nominalne vrijednosti od 3,5-3,7 V. To jest, naš radni kapacitet baterija je puno manji od izmjerenog. To se mora uzeti u obzir. Možda je u budućnosti vrijedno razmisliti o baterijskom paketu napravljenom četiri baterije. Je li moguće jednostavno zamijeniti bateriju i napajanje za punjenje? da pogodimo. Dobit ćemo raspon napona od 14,4-16,8 V. Pretvarači napona rade s ulaznim naponom do 32 V. Otporni razdjelnici će nam dati raspon napona telemetrijskih signala od 4,3-5,1 V, što je malo izvan gornjeg raspona 0-5 Q. Ali to se može parirati na razini kontrolne ploče - ako je napon telemetrije 5 V, tada će se baterija nakon nekog vremena gotovo napuniti. S druge strane, snizite li napon na motore na 6-7 V, možete više isprazniti postojeći akumulator i učinkovitije koristiti baterije - u tom slučaju trebate podesiti samo jedan pretvarač napona. Na prvi pogled postoji prostor za buduća istraživanja bez ikakve promjene hardvera, a kako točno interpretirati telemetrijske signale ovisno o instaliranom baterijskom paketu - neka se odluči na razini upravljačke ploče, odnosno za sada vi ne mogu razmišljati o tome.
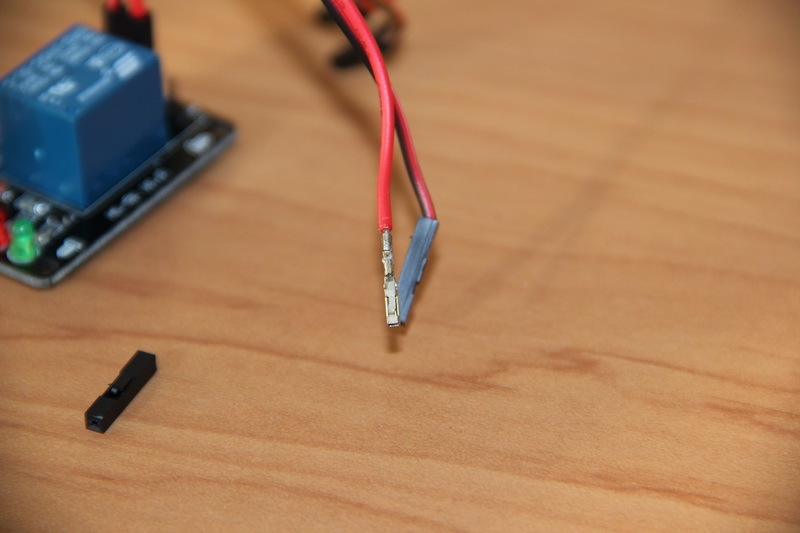
Posebnim kliještima (striperom) skinuo sam izlazne žice iz dobivenog akumulatora i stisnuo ih u metalne kontakte pomoću kliješta za stiskanje (crimper), zalemio ih radi pouzdanosti i stavio plastična kućišta na njih, dobivajući BLS konektore. Za lemljenje je korištena stanica za lemljenje, kao lem je korišten POS-61 bez kolofonija, a kao fluks bez čišćenja FluxPlus NC-D500.



Nakon sastavljanja baterije i ugradnje baterija u nju, neće proizvesti ništa. Ovako je raspoređeno mnogo kontrolera litij-ionskih baterija - onemogućavaju opterećenje u slučaju kratkog spoja, jakog pražnjenja, viška struje pražnjenja. Kako biste "resetirali" zaštitu i doveli bateriju u radno stanje, morate primijeniti 12-12,6 V na +P / -P kontakte. Isto se mora učiniti nakon prvog spajanja baterija na kontroler. Nakon toga možete se uvjeriti da jedinica proizvodi napon ako su baterije ispravno spojene na kontroler.
Za punjenje takvih akumulatorskih sklopova postoje izvori napajanja s izlaznim naponom od 12,6 V (3x4,2 V). S takvim napajanjem baterije će se učinkovitije koristiti iako se mogu koristiti i izvori napajanja od 12 V. Takav izvor napajanja već imam od 12,6 V i struje 5 A. deklarirao je karakteristike. Najjednostavniji test je test nosivosti. Za to sam koristio keramičke otpornike od 1 ohma 10W i 4,7 ohma 10W. Nakon što sam sklopio sklop s otporom od 2,5 ohma od takvih otpornika, spojio sam na njega napajanje i izmjerio napon na njegovom izlazu. S nazivnom strujom od 12,6 / 2,5 \u003d 5 A, moje napajanje je dalo 12,6 V - ovo je izvrstan rezultat. Kineski izvori napajanja, na kojima je nešto napisano, poput 12V3A, često počinju "tonuti" za 10-20% pri opterećenju od samo oko 1 A.


Po analogiji su pripremljeni prekidač i utičnica.

Priključni blok je uklonjen iz relejnog modula pomoću sušila za kosu, a PLS kontakti su zalemljeni. Za spajanje ovog modula na napojnu ploču napravio sam žice - ogolio sam, stegnuo i zalemio žice za napajanje (kroz koje će biti spojeni konektor za napajanje i baterija) presjeka od 18-20 AWG. A za kontrolu sam koristio žice koje imam, s tanjim žicama, koje se lako traže pod imenom "Dupont".
Isto je učinjeno i s vozačem motora.


"Noge" su zalemljene na DC / DC pretvarače. Vrijedi spomenuti da su ti kontakti izrađeni od metala koji je dobro lemljen samo aktivnim fluksom. Zatim, umjesto FluxPlus-a, koristim LTI-120, nakon čega slijedi brisanje mjesta lemljenja krpom navlaženom izopropanolom kako bih uklonio ostatke fluksa.

Sada izrađujemo našu ploču s elektronikom. Za početak, dobro je zamisliti općenito kako i što će biti spojeno na ploči. Odnosno, pokušajte nacrtati ploču.
[Power board]

Pogodite gdje sam smislio i "lizao" ovu ploču? Vidimo dva konektora na ploči, dva pretvarača napona. Pojavio se dodatni kratkospojnik (uklonjivi kratkospojnik) koji se može instalirati isključivanjem osigurača iz električnog kruga - to sam učinio namjerno zbog banalnog nedostatka osigurača u vrijeme proizvodnje ploče.
Odlemljenje ploče je prilično zamoran i mukotrpan posao. Koristio sam 18-20 AWG žice za napajanje, 26-30 AWG žice za ostale signale. Čemu matična ploča i gnjavaža s ožičenjem? Jer imamo samo prvi prototip. Nešto se može promijeniti, pa je ponovno lemljenje ožičenja lakše od rezanja staza i lemljenja svih vrsta kratkospojnika na gotovoj tiskanoj ploči. Potrebno je vrijeme za izradu tiskane ploče - uzgoj, izradu maske, kiseljenje, bušenje, kalajisanje, lemljenje - malo je vjerojatno da će to trajati manje vremena nego za izradu ploče s "ožičenjem". Iako će tiskana ploča biti pouzdanija i izgledati profesionalnije.
Iz istih razloga, moduli DC / DC pretvarača nisu lemljeni na ploči, već su izrađeni u obliku uklonjivih modula, idealno, nakon početnog otklanjanja pogrešaka, moraju se dodatno pričvrstiti na konektor, na primjer, ispuštanjem vrućeg ljepila . Nije loše na isti način povećati pouzdanost veze svih konektora. Ali dok imamo prototip, prikladnije nam je učiniti sve uklonjivim kako bismo u procesu budućeg otklanjanja pogrešaka imali slobodan pristup svakom važnom čvoru i olakšali njegovu zamjenu ako je potrebno.




Nakon proizvodnje ploče, potrebno je provjeriti usklađenost primljene sa dijagramom strujnog kruga i dijagramima ožičenja. Pomoću multimetra provjeravam ulaze i izlaze na kratki spoj (bolje je ne "zvoniti" kontakte, već izmjeriti njihov otpor, jer u slučaju pogrešne izrade ili dizajna, na primjer, otpor od sto ohma može se formirati na ulazu, koji možda neće "zvoniti", ali njegova prisutnost bit će pogreška u krugu i može uzrokovati velike probleme), a također provjerite je li sve spojeno kako treba biti unutar ploče.
Nakon provjere prije sastavljanja, trebate biti sigurni da će ploča raditi normalno sa svim povezanim periferijama. Da biste to učinili, prvo morate spojiti bateriju, prekidač za napajanje i okrenuti prekidač. LED diode na pretvaračima napona trebaju svijetliti i ništa neće gorjeti. Dok ništa nije povezano, morate se prilagoditi izlazni napon pretvarači. Zatim se napajanje isključuje, relejni modul se spaja i napajanje se ponovno uključuje. Tako su svi periferni uređaji povezani korak po korak i pod kontrolom.
Montaža i spajanje platformske elektronike
Elektronika je spremna. Sada ga trebate instalirati. Sjećate se, sjedala elektroničkih ploča su bila označena? Akumulatorskim odvijačem buše se rupe na pravim mjestima. Zatim se poliraju mini-bušilicom s mlaznicom za mljevenje. M2 vijci su uvrnuti u rupe. Podloške se moraju postaviti ispod vijaka i matica. Osim toga, zavrnuo sam drugu maticu - matica za zaključavanje osigurat će pouzdaniju navojnu vezu i smanjiti vjerojatnost odmotavanja. Izrađujemo stroj.
Imajte na umu da je udaljenost između dva susjedna motora prilično velika. Ovo je važna točka na koju vrijedi obratiti pažnju iz sljedećeg razloga. Činjenica je da su odabrani motori bez povratnih informacija. Na njih samo primjenjujemo određenu razinu napona i oni se vrte određenom brzinom. No karakteristike motora mogu se razlikovati, što će zasigurno dovesti do problema u pravocrtnom kretanju. Ako je širenje motora malo i robotom će upravljati samo operater, koji uvijek može ispraviti kretanje, onda to možda i nije značajan problem. Ali ako je širenje značajno ili će robot morati putovati dugu udaljenost "ravnocrtno" u automatskom načinu rada, tada se mora osigurati povratna informacija. Postoji serija GM25-370 motora, identičnog dizajna, na kojima su već ugrađeni Hallovi senzori. Što je? Na stražnjoj strani motora, na izduženoj osovini, pričvršćen je disk, na koji je postavljen magnet, koji će utjecati na Hall senzor. Nakon svake pune rotacije diska, primamo impulsni signal čiji se obrada može podesiti na broj okretaja u minuti. Dakle, naša platforma ima prilično ozbiljne temelje za budućnost: moguće je ugraditi motore s povratnom spregom, spojiti ih na strujnu ploču, koja će napajati senzore na njima, te prenositi telemetrijske signale na upravljačku ploču - upravljački sustav može automatski izjednačava brzinu motora.


Zalemio sam žice na motore u skladu s oznakama na njima - na svakom motoru je crvena točka bila nanesena u blizini jednog od dva kontakta. Nakon što sam dobio motore, provjerio sam ih, ali nisam obratio pažnju na ispravnost ove oznake. Jedan od motora je, inače, došao s brakom i uopće nije skrolao, prodavač mi je ljubazno poslao zamjenu, koja mi je stigla barem mjesec dana. Nakon toga se pokazalo da je jedan od motora imao pomiješane oznake, ali to nije važno - samo promijenite polaritet spajanja ovog motora na ploču za napajanje. Gledajući naprijed, reći ću da se ista situacija dogodila s spajanjem "dasaka" - kada je data naredba "naprijed", kotači na desnoj strani rotirali su se naprijed, s lijeve strane - natrag. To se također ispravlja promjenom polariteta povezivanja željenog kanala pokretača motora na strujnu ploču. Promjena polariteta veze - nema potrebe za lemljenjem ili ponavljanjem bilo čega, samo trebate zamijeniti žice.
Kako bih isključio električni kontakt između elektroničkih ploča i kućišta, izrezao sam plastične ploče od blister pakiranja do dna platforme.

Ugradite bateriju. Plastika je vrlo mekana i doslovno visi ispod glave vijka, čak ni podloška ne spašava, pa sam morao koristiti dugu metalnu ploču.


Svi naši vijci i matice s donje strane malo su smanjili razmak od tla i izgledaju prilično estetski.


Izoliramo dno na mjestima gdje su ugrađene elektroničke ploče. Također smo izrezali i stavili plastičnu traku na metalnu ploču u bateriji kako bismo spriječili čak i grebanje kućišta baterije na glavi vijka, litij je ozbiljan!


Ugrađujemo i pričvršćujemo elektroničke ploče i konektor za napajanje.






Noćna mora, koliko žica ... Povezujemo periferiju na ploču za napajanje.


Elektronika za upravljanje platformom
Kao što razumijete, u načelu, zadatak je završen. Platforma je primljena, sve je ispalo sasvim dobro. Za upravljanje platformom možete koristiti bilo koji mikrokontroler, FPGA, Arduino ploče, Intel Galileo i još mnogo toga.Odabrao sam Arduino Nano ploču, pronašao jeftinu i prikladnu ploču za proširenje za povezivanje perifernih uređaja i bluetooth modula na nju. Osnovna ideja je kontrolirati našu platformu s pametnog telefona putem bluetootha. Ploča za proširenje, sa svojim obiljem kontakata za povezivanje vanjskih uređaja, omogućit će vam besprijekorno povezivanje budućih perifernih uređaja robota u budućnosti.


Sada trebamo dizajnirati i izraditi sklopnu ploču za ovu elektroniku. Napravit ćemo "sendvič": sklopnu ploču na koju je ugrađen bluetooth modul i ploču za proširenje, u koju je, pak, ugrađena ploča s mikrokontrolerom.

U usporedbi s pločom za napajanje, ova ploča je gotovo isključivo prekidačka. U sredini je kabel spojen na 18-pinski troredni konektor, koji povezuje ovu upravljačku ploču s pločom za napajanje. Iz ovog konektora signali se usmjeravaju na željene pinove ploče za proširenje, koji zatim idu na željene, unaprijed odabrane pinove mikrokontrolera. Također, 5 V i Vbat izlaze na odvojene pinove na ploči. Napajanje se dovodi do bluetooth modula na ploči, njegovi Rx/Tx ulazi su spojeni na Rx/Tx ulaze Arduino Nano ploče preko ploče za proširenje. Na ploči se nalazi uklonjiva bipolarna LED dioda, čija je svrha označavanje svih procesa vezanih uz napajanje. LED može oblikovati zeleni i crveni konstantni sjaj, treptati određenom frekvencijom - to bi trebalo biti dovoljno da ukaže na normalan napon baterije, njezino pražnjenje, ukaže na proces punjenja i izvijesti o ispravnosti priključenog izvora napajanja.
Kako se ne bi zbunili što i gdje spojiti, shematski sam nacrtao Arduino Nano ploču i rasporedio signale za nju.

Rx/Tx portove zauzima bluetooth modul koji radi putem UART protokola. Signali IN1-IN4, ako je moguće, spojeni su na digitalne priključke - polaritet ovih signala će odrediti smjer rotacije motora, a ENA / ENB na one portove koji vam omogućuju izdavanje PWM signala - ti signali će postaviti brzinu rotacije motora. Vrijednosti signala telemetrije platforme bit će digitalizirane analognim ulazima A0-A3 Arduino Nano ploče. LED dioda zauzima portove A4 i A5, a povezana je preko jumpera. Činjenica je da su ova dva porta potrebna za jednostavnu organizaciju I2C protokola i, ako nam zatreba, jednostavno možemo ukloniti skakače. LED se također može "baciti" na druge slobodne portove ili spojiti na oslobođene portove A4 i A5 modul za proširenje porta (na primjer, na temelju PCF8574T čipa - osigurat će osam dodatnih digitalnih ulazno/izlaznih portova, modul se kontrolira samo koristeći I2C protokol), upariti čije izlaze i spojiti LED. Kao rezultat ove distribucije veza, sačuvane su mogućnosti besprijekornog povezivanja SPI uređaja, digitalizacije još dva analogna signala, te izlaza do četiri PWM signala (npr. za upravljanje servom). Općenito, želio bih više besplatnih signala, ali njihov se broj može povećati pomoću PCF8574T. Na kraju, možete koristiti drugi Arduino Nano ili ga zamijeniti platformom prikladnijom za tražene zadatke - određeni minimum ovu odluku u potpunosti pruža.
Također, naša ploča omogućuje jednostavno spajanje na napajanje: postoje kontakti za napajanje od 5 V i napon iz baterije (do 12,6 V).
Vrijedi napomenuti jednu nijansu korištene ploče za proširenje za Arduino Nano. U principu, ploča za proširenje vam omogućuje da na njoj pokrenete Vbat. Na ploči za proširenje je ugrađen pretvarač napona koji snižava ulazni napon na 5 V i njime napaja Arduino Nano ploču, čiji pretvarač snižava na 3,3 V, a taj napon je već uklonjen s Arduino Nano ploče i distribuiran na odgovarajuće kontakte ploče za proširenje. Međutim, nisam to učinio i doveo sam 5 V na odgovarajući pin ploče za proširenje. Osim toga, kontrolna LED dioda na ploči za proširenje uopće nije zasvijetlila ako Arduino Nano ploča nije instalirana, odnosno ova ploča za proširenje bez Arduino Nano-a, po svemu sudeći, zapravo ne radi. Nisam razumio razloge, ali sam primijetio ovu točku.
Izrađujemo ovu kontrolnu ploču.
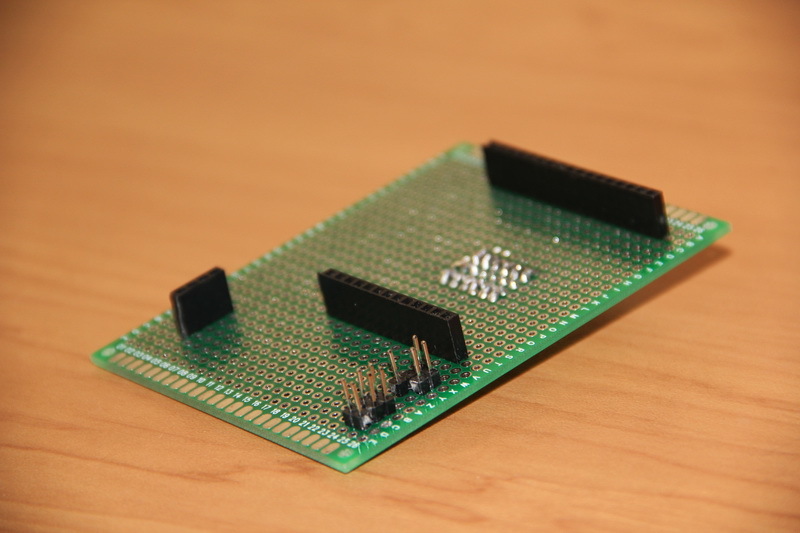


Na njega postavljamo elektronske ploče.



Pripremamo sjedala za našu naknadu. Ugradite prekidač u isto vrijeme.


I skupljamo sve.


Sada morate napraviti kabel za spajanje dvije ploče. Također lemimo priključke za napajanje radi pouzdanosti. Ispravno i vrlo pažljivo provjerite sve. 12 V bi trebao doći do 12 V, a 5 V na 5 V. Slike strujnih i upravljačkih ploča pokazuju "pogled odozgo", odnosno, ako okrenete ploče, zatim na donju stranu za lemljenje ploče, kontakti su obrnuti - to je potrebno uzeti u obzir pri izradi kabela i prosljeđivanju odgovarajućih žica u njemu. Napravio sam konektore jednostavno: prvo je upisan niz žica s BLS konektorima i omotan 2 puta trakom. Zatim su sva dva / tri reda skupljena i ponovno čvrsto omotana trakom. Ispalo je cijeli i monolitni konektor. Neiskorišteni pinovi konektora jednostavno su postavljeni plastičnim BLS konektorima bez pinova.
Nakon izrade kabela, sve elektroničke ploče se skidaju s upravljačke ploče, te se provjerava multimetrom na isti način kao i strujna ploča. Upravljačku ploču spajamo na ploču za napajanje i primjenjujemo napajanje. Pomoću multimetra pažljivo provjeravamo kontakte napajanja svih modula, zanimaju nas naponi telemetrijskih signala - još jednom se uvjeravamo da je sve ispravno ožičeno. Ne morate to raditi, samouvjereno sve sastavite, uključite napajanje i otkrijte da su na neki, naravno, mističan način, žice od 5 V i Vbat pomiješane i Arduino ploča i bluetooth modul izgorjeli. Ali bolje je ne ponavljati tuđe greške.
Na fotografiji možete vidjeti da je jedna od crvenih žica za napajanje obojena srebrom. Ovo je oznaka vodiča koji prenosi napon Vbat. Kada je uređaj sastavljen, korisno je napraviti "ključeve" za spajanje. Na primjer, nemojte posebno lemiti jedan PLS kontakt na konektoru i pokvariti recipročnu utičnicu u kabelu ili je začepiti komadom izolacije - u ovom slučaju se implementira "zaštita od budale", jer se tada takav kabel može samo instaliran bez grešaka na odgovarajući konektor na ploči, jednostavno zato što se inače neće instalirati (metoda ne daje 100% jamstvo - internet je pun slika kada posebno uporni pojedinci nekako uspijevaju zaobići takvu zaštitu koristeći zavidnu upornost i njihova izuzetna snaga). Obično obojim odgovarajuće pinove na konektorima. Bilo bi korisno na ovaj način označiti ulazne konektore DC/DC pretvarača na napojnoj ploči i obojiti odgovarajuće utičnice na ploči. To bi eliminiralo pogrešnu ugradnju pretvarača, a ako koristite više boja, to će eliminirati zbrku ploča pretvarača koje čine 5 V i 9 V. Za identifikaciju se može koristiti svijetli ženski lak za nokte. Ovo malo pravilo uvelike pomaže kod čestog sastavljanja / rastavljanja uređaja koji se razvija u fazi otklanjanja pogrešaka i testiranja.



Spojite kabel na ploču za napajanje.
Vratio bih se nakratko na početak članka, na trenutak kada smo platformu podijelili na dva dijela i "zasebno" izvadili upravljačku ploču. U to vrijeme to se činilo kao vrlo uravnoteženo rješenje. Međutim, gledajući obilje pinova na Arduino ploči za proširenje, shvaćamo da se dobra polovica ovih pinova ne može koristiti u trenutnoj implementaciji platforme - zauzeli smo gotovo polovicu I/O konektora na Arduino ploči . I sam mikrokontroler "uvija" ne samo program za izdavanje para PWM signala motorima, već pruža potpunu kontrolu nad unutarnjim i vanjskim napajanjem cijele platforme. Vrijedi razmisliti - možda je vrijedno uključiti mikrokontroler u motorni prostor naše platforme? Bluetooth "daj" "nadplatformskoj" elektronici koja će upravljati uređajima robota, te razmisliti o spoju sučelja s njim. Možete organizirati UART protokol (trebat će dva pina mikrokontrolera) preko kojeg će se prenositi paket podataka koji sadrži smjer i brzinu rotacije motora, kao i opće stanje platforme ... I moramo dobro razmisliti o dizajnu, budući da nemamo toliko prostora u motornom prostoru ... Iako ... Ako rasporedite i pomaknete relej ...
E, tu je kraj moje duge i ponekad dosadne priče. Samo je “hardver” – hardver platforme – razvijen, proizveden i sastavljen. Sljedeći dio posla je softver. Ali to ne znači da će samo programer morati dalje raditi. U procesu stvaranja firmwarea za mikrokontroler i njegovog otklanjanja pogrešaka, ponekad morate uzeti multimetar, ili čak osciloskop, i shvatiti koji signal, gdje i u kojem obliku dolazi. Obično se na početku ove faze, u većoj mjeri, pojavljuju pogreške i previdi faze „željeznog“ projektiranja. Naš je uređaj vrlo jednostavan, pa ako nešto ne radi, pogreška će se brzo pronaći. Možete li zamisliti kako je raditi sa stvarno složenim sklopovima? Tu morate biti mnogo oprezniji i točniji. Također će biti potrebno organizirati kontrolno sučelje putem bluetootha s pametnim telefonom - kako bi se smislio nekakav protokol za informacijsku interakciju između robota i telefona. I razviti softver s kojim je udobno i praktično upravljati robotom. Ali ovo je sve druga, zasebna priča.
Neki od korištenih alata i opreme
Bosch olovka za ljepilo. Pištolj za ljepilo. Prema Bosch terminologiji - ljepilo. Odlično mobilno rješenje. Radi na 18650 bateriji, odnosno neće biti problema s zamjenom u budućnosti, a tu se više nema što kvariti. Brzo se zagrijava (15 sekundi) i spreman je za rad, nakon gašenja gotovo odmah prestaje raditi - ljepilo ne teče iz njega kao kod ostalih termo pištolja. Našao je primjenu u svakodnevnom životu i rukotvorinama. Jedini negativ su ne tako uobičajeni štapići ljepila: 7 mm, visoka temperatura 150 ... 170C (prikladni su štapići DREMEL GG01 i GG03).

BRUTO 17718. Alat za skidanje (striper). Potpuni analog poznatog modela KBT WS-04A, koji su mnogi proizvođači donirali 1-u-1.

HT-202A. Alat za stiskanje žica s kontaktima konektora (krimper).

Solomon SL-30. Pouzdana stanica za lemljenje. Napon napajanja lemilice 24V. Poniklani vrh. Precizna kontrola temperature.

SAIKE 8858. To je također Element 8032. Također je Yihua 8858. Također je ZHaoxin 858DH. Postoje varijacije između ovih modela, ali izvedba, grijači i elektronika su isti. Dobra, praktična, jeftina i stvarno kompaktna sušilica za lemljenje. Kupio sam ga na uvoznom mjestu, s naknadnim usavršavanjem jeftine kineske industrije: istresao bilo koji metalni (!) Otpad, oprao fluks, lemio kontakte na ploči, triac za napajanje je stavljen na KPT8. Dok zadovoljan, fen je kao fen, puše, temperatura i brzina puhanja su podesivi. U principu, sušilo za kosu opravdava svoj novac. Relativno nedavna kupnja i statistika o pouzdanosti još uvijek je nejasna, ali pretpostavljam da će poslužiti za rijetke radove.

Metabo BZ 12SP. Vrlo stari odvijač. Rijetkost. Ove vjerojatno više nisu na prodaju. Omogućuje vam prilično fini rad zbog dobrog centriranja i izostanka vretena.

Velleman VTHD02. Mini bušilica. Ili kako se još naziva - dremel (iako je to netočno na isti način kao što se kopirke nazivaju kopirke). Nakon što je kupljen set za promociju, više mi je laskao set mlaznica nego sama bušilica. Međutim, pokazalo se da je s profinjenošću prehrane prilično dobro. Radi iz matičnog napajanja, ali pod opterećenjem joj je nekako teško. Prije otprilike dvije godine, naravno, isključivo privremeno, napravljeno je mobilno napajanje iz pretinca za četiri 18650 baterije s podesivim izlazom. Minidrill je postao autonoman. S takvom snagom, minibušilica se počela osjećati puno bolje i pokazala se kao vrlo koristan uređaj u kućanstvu.


Noble NB4000P-4. Multimetar. Zgodno je da se žice u potpunosti uklone unutra. Stečena tijekom teških studentskih godina. Odnosno, dugo vremena. Žice su se davno prekinule - morao sam "operirati" s još jednog propalog multimetra. Sada su žice nestale. Baterija i osigurač su mijenjani nekoliko puta. Do sada radi - nevjerojatna pouzdanost s osrednjom točnošću.

Fluke 179. Multimetar visoke preciznosti. Visokokvalitetan, praktičan i, što je najvažnije, precizan alat.

Primljeno kao reklama. Iako… zašto ne – gdje je onda moja provizija? Svi ovi alati služe za općenite informacije. Svojedobno sam, primjerice, otkrio striptizete koje proces skidanja žica iz rutine pretvaraju u užitak i uopće ne žalim što sam kupio BOSCH GluePen. Možda će ovaj mali izbor nekome pomoći.
Za sastavljanje vašeg robota uopće nije potrebno imati raznovrstan i skup alat, iako svakako poboljšava kvalitetu rada i donosi više zadovoljstva. Dovoljno je imati obično lemilo, nekoliko odvijača i bušilicu. Na kraju, nekoć je autor ovog članka, davno, imao samo kliješta, čekić, par odvijača, bakrenu žicu, podupirač (još negdje!) i dvije bušilice, komade telefonskih žica i puno plava električna traka (često - ranije korištena), to je bilo sasvim dovoljno da se napravi najjednostavniji automobil, koji je, kada se pritisne gumb, išao ravno sam od sebe.
Glavne komponente
Po popularnom zahtjevu čitatelja, dajem linkove (ebay/aliexpress) na glavne komponente. Linkovi rade od rujna 2016. Sve je naručeno prije šest mjeseci (veljača-ožujak 2016.), pa preporučam da pogledate dodatno - možda sada možete kupiti po povoljnijoj cijeni.
Šasija, motori, kotači, pričvršćivači - platforma (izbor u dvije boje) + 4 * (točak 80 mm + pričvršćivači + motor (izbor od tri brzine))
Obratite pažnju na sljedeći set - kotač od 130 mm + pričvršćivači + motor s Hall senzorom
Obratite pažnju na kapacitetne baterije (radio sam s njima nekoliko puta - ove baterije obično imaju isti stvarni i deklarirani kapacitet, tj. stvarno imaju 3400 mAh!) - Panasonic NCR18650B 18650 / 3400 mAh / 3.7V / nezaštićeni HC Module 5
0.9% Strašno - gdje je tu kultura govora, normalna konstrukcija rečenica... autor treba naučiti sintaksu, i morfologiju! 2
5.9% Teško mi je odgovoriti ili objasniti u komentarima. 12
Platforma koja ispunjava niz zahtjeva: slobodno kretanje, mogućnost ugradnje dodatne opreme i proširivost, kao i umjerena cijena. Ovo je takva robotska platforma ili, jednostavno, šasija gusjenice, i ja ću to učiniti. Naravno, objavljujem upute da prosudite.
Mi ćemo trebati:
Tamiya 70168 dvostruki stupanj prijenosa (može se promijeniti u 70097)
- Tamiya 70100 set valjaka i gusjenica
- Tamiya 70157 platforma za montažu mjenjača (može se zamijeniti komadom šperploče 4 mm)
- Mali komadi pocinčanog lima
- Šperploča 10 mm (mali komad)
- Arduino Nano
-DRV8833
- LM 317 (stabilizator napona)
- 2 LED diode (crvena i zelena)
- Otpornici 240 Ohm, 2x 150 Ohm, 1,1 kOhm
- Kondenzator 10v 1000uF
- 2 jednoredna češlja PLS-40
- 2 PBS-20 konektora
- Induktor 68uH
- 6 NI-Mn baterija 1.2v 1000mA
- Muško-ženski konektor dva pina po žici
- Žice različitih boja
- Lemljenje
- Rosin
- lemilica
- Vijci 3x40, 3x20, matice i podloške za njih
- Vijci 5x20, matice i ojačane matice za njih
- Bušilica
- Bušilice za metal 3 mm i 6 mm
Korak 1 izrežite metal.
Za početak trebamo izrezati četiri dijela od lima (po mogućnosti pocinčanog). Dva komada po stazi. Iz ovog skeniranja izrezali smo dva dijela:
Točke označavaju mjesta na kojima je potrebno izbušiti rupe, pored toga je promjer rupe. Rupe od 3 mm potrebne su za vješanje s valjkom, 6 mm za provlačenje žica kroz njih. Nakon rezanja i bušenja, morate proći kroz sve rubove s turpijom, ne ostavljajući oštre kutove. Savijte se za 90 stupnjeva duž isprekidanih linija. Budi oprezan! Prvi dio savijamo u bilo kojem smjeru, a drugi savijamo u suprotnom smjeru. Trebali bi biti simetrično savijeni. Postoji još jedna nijansa: potrebno je izbušiti rupe za vijke koji pričvršćuju naše ploče na bazu. To treba učiniti kada je baza spremna. Obradak nanosimo na podlogu i označavamo mjesta bušenja tako da samorezni vijci padnu u središte iverice. Izrađujemo još dva detalja na drugom zamahu:





Korak 2 pripremite bazu.
Mjenjač sastavljamo prema priloženim uputama. Pričvršćujemo ga na platformu. Ako nema platforme, izrežemo pravokutnik 53x80 mm od šperploče od 4 mm i na njega pričvrstimo mjenjač. Uzimamo šperploču 10 mm. Izrežite dva pravokutnika 90x53 mm i 40x53 mm. Unutar malog pravokutnika izrežite još jedan pravokutnik tako da dobijemo okvir debljine stijenke 8 mm.

Sve uvijamo kako je prikazano na fotografiji:




U uglovima platforme izbušite rupe od 6 mm i umetnite naše vijke 5x20 u njih i na vrhu privijte ojačane matice. Potrebni su za naknadno pričvršćivanje raznih mehanizama ili ploča. Radi praktičnosti, odmah lijepimo LED diode:


Korak 3 električar.
Za kontrolu ćemo koristiti Arduino Nano. Pogon motora DVR 883. Na pločici sastavljamo sve prema shemi.

L1 je induktor, a C1 je potreban za stabilizaciju napona Arduino. Otpornici R1 i R2 ispred motora ograničavaju struju, njihova vrijednost mora biti odabrana za određene motore. Radim dobro na 3 oma. LM317 je potreban za punjenje baterija. Na ulaz se može primijeniti napon od 9,5 V do 25 V. R3 - 1,1 kOhm R4 - 240 Ohm. "Pinovi" s lijeve strane služe za naknadno povezivanje raznih vrsta uređaja (Bluetooth, 433 MHz komunikacijski modul, IR, Servo itd.). Za napajanje ćemo koristiti 6 Ni-Mn 1.2v 1000mA baterija zalemljenih u seriju i namotanih električnom trakom.

Korak 4 sastavite bazu.
Uzimamo našu bazu, zalijepimo ploču na nju dvostranom trakom. Prema prvom skeniranju, metalni dijelovi moraju biti pričvršćeni na male samorezne vijke na podnožje sa strane, sa savijenim dijelovima prema van. Pazite da ga pričvrstite tako da se krajnji otvor od 6 mm stavi na izlaznu osovinu mjenjača, dno dijela mora biti paralelno s bazom i simetrično u odnosu na drugi dio istog dijela. Kao rezultat, trebali biste dobiti:




Kako bismo našoj domaćoj izradi dali estetski izgled, dodat ćemo par detalja. Nije obavezno. Iz bijele plastike izrežemo pravokutnik 110x55 mm i savijamo ga kao što je prikazano na fotografiji. Rep također nije obavezan, ali mi se svidjelo kako izgleda i hladno se trese kada se kreće:


Ovaj poklopac prekriva mjenjač kako prljavština ne bi ušla u njega, a stvara manje buke. Zatim smo također izrezali pravokutnik 52x41 mm od bijele plastike. Izrađujemo rupe za spajanje Arduina i gumba za isključivanje kao na fotografiji:

Sve to lijepimo na dvostranu traku:

Naljepnica ljepote.

Ova dva dijela mogu se izraditi od gotovo bilo kojeg materijala koji je pri ruci. To može biti debeli karton (koji se zatim može obojiti), vlaknasta ploča, tanka šperploča ili list plastike bilo koje boje. Ne zaboravimo baterije. Zalijepite ih na dvostranu traku na desni metalni dio baze:

Korak 5 gusjenice.
Ovdje su nam potrebne naše praznine za drugi zamah. U rupe od 3 mm ubacujemo vijke s polucilindričnom glavom 3x20. Stavljamo podloške i zategnemo matice.
Nominalni napon jedne 18650 litij-ionske ćelije je 3,6-3,7 V. Potpuno napunjena ćelija proizvodi 4,1-4,2 V. Ali s minimalnim naponom to je teže - konačni napon pražnjenja ovisi o vrsti baterije i ova brojka može fluktuiraju unutar 2,6-3,2 V. Možete prazniti i niže, ali to je siguran put do brze degradacije baterije. Odlučio sam pooštriti procjenu napona koji proizvodi baterija s rasponom nominalno-maksimalnih. Tada se ispostavlja da sklopovi od dvije, tri i četiri uzastopne baterije daju raspone od 7,2-8,4 V, 10,8-12,6 V, 14,4-16,8 V. Iz takvog sklopa trebamo dobiti dva napona - neki napon za napajanje motora i 5 V za napajanje elektronike. Moguće je napajati motore na 6 V sa sklopom s dvije baterije pomoću DC/DC buck pretvarača, ali razlika između minimalne vrijednosti napona (kada se baterija isprazni do nominalnog bit će 7,2 V) i 6 V će biti reda veličine 1,2 V, što može biti nedovoljno za stabilan rad DC/DC buck pretvarača - kako bi se izbjegli problemi, potrebno je imati razliku napona između njegovog ulaza i izlaza od najmanje 2 V ( zapravo, možda će biti manje za pretvarače s malim prekidom, ali nećemo se fokusirati na njih). Sklop od tri elementa je sasvim prikladan za nas, potrebne napone ćemo dobiti korištenjem step-down DC / DC pretvarača. Motori se mogu napajati i na 9V, tada ćemo u najgorem slučaju dobiti razliku od 1,8V, što bi trebalo biti sasvim dovoljno. Prikladan je i sklop od četiri elementa, ali morate razumjeti da je dodatna baterija dodatna težina i zauzima prostor, iako je potrošnja energije cijele baterije velika.
Drugi način organiziranja napajanja je korištenje paralelnih veza istih baterija i DC/DC pojačivača. Zatim, s 3,6-4,2 V, napon se može povećati na 5 V za elektroniku i do 6-9 V za motore. Čini se da se kapacitet takvog sklopa baterija može lako mijenjati dodavanjem novih ćelija, ali ne zaboravite da korištene baterije moraju imati sličan kapacitet i unutarnji otpor.
Postoje posebne upravljačke ploče za punjenje/pražnjenje serijskih ili paralelnih baterija. Zaštitni regulatori štite sklop akumulatora od prekomjernog punjenja ili pražnjenja (kontrola napona), kratkog spoja, prekoračenja dopuštene struje pražnjenja. Kada koristite takve jednostavne ploče, potrebno je vanjsko napajanje s ograničenjem struje punjenja. Kontroleri punjenja/pražnjenja mogu samostalno puniti baterije cc/cv metodom s ograničenjem struje punjenja. Napredni kontroleri za serijsko spajanje baterija također mogu osigurati individualno punjenje za svaku bateriju - balansiraju ćelije baterije.
Odabrao sam serijsku shemu povezivanja baterije koristeći zaštitnu ploču i vanjski punjač. U budućnosti se takva jednostavna upravljačka ploča može zamijeniti balansiranim regulatorom punjenja. Iako balansiranje nije potrebno s paralelnom vezom, mora se imati na umu da ako je jedna baterija jako istrošena, kontroler to neće moći detektirati i to može biti bremenito nečim. Također je vrijedno uzeti u obzir činjenicu da će načini rada svake baterije biti različiti. Na primjer, pri uklanjanju istog napajanja, baterije u paralelnoj vezi morat će dati više struje nego u paralelnoj vezi.
Stoga su prikladni motori s nazivnim naponom od 6 V i radnim rasponom od 3-9 V. Odabrao sam motor s brzinom od 281 o/min i potrošnjom, u stanju mirovanja, od 80 mA. Pod opterećenjem, brzina pada na 238 o/min, struja se povećava na 380 mA, dok motor proizvodi 2 W snage i razvija okretni moment od 0,5 kg * cm. Kada je motor zaustavljen, okretni moment se povećava na 4 kg * cm, a struja na 900 mA. Sve ove karakteristike su preuzete s tablice objavljene na web stranici jednog od prodavača robe, budući da nisam mogao pronaći normalan "datasheet".
Sklop trupa i podvozja
Naručio sam sljedeće motore.
Ako pogledate fotografiju, možete vidjeti igle na osovinama koje strše iz motora. Za ove motore pronađen je set spojnica i kotača.
Kotači promjera 80 mm, mekana guma, s čavlima.
Samu bazu sam namjeravao napraviti od širokih aluminijskih kutova (ili nečeg sličnog što se može naći u željezarama) s kojim ću napraviti “bočni” okvir koji se zatvara nekim laganim, izdržljivim, metalnim pločama. Na pravim mjestima se buše rupe i po potrebi se režu navoji. Međutim, prvo sam odlučio potražiti što kineska industrija nudi. I pronašao sam komplet - šasiju za izradu robota, koja je sadržavala samo tijelo, gore spomenute motore, spojke i kotače, kao i pretinac za baterije AA, prekidač za napajanje, utičnicu i pričvrsne elemente. Samo kućište ima mnogo rupa, što ga logično čini lakšim, a njihova prisutnost trebala bi minimalizirati količinu bravarskih radova.
Procijenivši dimenzije i volumen unutarnjeg prostora (paralelno je odabrana elektronika za platformu, koja je u ovom slučaju morala stati), naručio sam ovaj komplet. Na motorima koji su stigli, kao što vidite gore, iz nekog razloga piše JGA25-370-9v-281rpm. Zašto baš 9v, kada je denominacija ove podskupine 6 V, nisam razumio, ali, vjerojatno, Kinezi bolje znaju što napisati kako bi se bolje prodali.
Sama kutija je teška gotovo 400 grama. Od kojeg je materijala, teško mi je odgovoriti, ali ne izgleda kao čisti aluminij.
Skinite poklopac i ugradite motore. Rupe za motore imaju promjer samo za vijke M3, nema margine za podešavanje položaja, ali, moramo odati priznanje, to nije izazvalo probleme - rupe se jasno podudaraju s navojima na kućištu motora.
Ugrađujemo spojnice.
I zavrti kotače.
Rezultat je bila gotova platforma s razmakom od tla od oko 23 mm.
Težina šasije "u praznom hodu" bila je nešto veća od kilograma. Sjećate se slika s mjerenjem mase pojedinih dijelova? 393+(58+85+20)*4 = 1045 grama. Cijeli sklop teži 1057 grama. 12 grama dodalo je 16 vijaka.
Evo jedne takve ispadne, prilično lijepe platforme.
Dijagram ožičenja
Ovdje je vrijedno objasniti važnu točku zašto baš ovaj kit. Činjenica je da ako sami napravimo slučaj, onda se njegov unutarnji volumen može učiniti proizvoljnim. Kupljena futrola nam osigurava strogo fiksiran volumen u koji sve mora stati. U idealnom slučaju, postoji i preostala margina. To se mora uzeti u obzir u početku i razumjeti: hoće li potrebno punjenje stati u ovom konkretnom slučaju ili ne, te će biti potrebno ili promijeniti elektroniku ili odabrati drugi slučaj. Unutar kućišta bit će ugrađeni: motori, baterija, drajver za motore, strujna ploča, na kojoj će se također nalaziti neka vrsta elektronike - isti pretvarači napona.Čini se da je jasno što ćemo točno imati unutra. Ali kako će se sve to povezati? Ako imate ideju, ali ne možete stvoriti njen imidž, nemate ideju. U elektronici se ispostavlja da bi trebale postojati dvije slike - vizualna, koja je već prilično zamišljena, i električna (zapravo postoji i ona algoritamska - kada se opisuje ponašanje uređaja, zbog njegove hardverske i/ili softverske (funkcionalnost firmvera) mogućnosti).
Provodim puno vremena putujući na posao. Općenito govoreći, uz pravi pristup, dugo putovanje može se pretvoriti u plus čitanjem knjiga, gledanjem/slušanjem popularno-znanstvenih programa ili audio knjiga koje nikada ne biste čitali, slušali ili gledali. Zahvaljujući takvim uvjetima postao sam obožavatelj i slušao sve priče modela za sastavljanje (tako da nije bilo pitanja u komentarima -). Robot-blud nije bio iznimka, a ja sam razmislio o konceptu platforme i nacrtao je na cesti na tabletu.
Dijagram je nacrtan u OneNoteu. Slika se može kliknuti. Da, sram me - sklopna shema izgleda neprincipijelno. Posljednja tri tjedna nisam se uspio posvetiti finom ugađanju članka, a već se postavilo pitanje - uopće nešto objaviti ili odgoditi “za kasnije”. Odlučio sam to objaviti na ovaj način, inače “za kasnije” može biti bremenito. Nacrtat ću normalne sheme - zamijenit ću slike. S druge strane, ovaj dizajn izgleda u stilu originalnog DIY-a. Na poslu ili kod kuće, kada se formira ideja, prvo se uzimaju obični list papira i obična olovka ...
Pogledajmo koncept što i s čime ćemo povezati. Na kontroler litij-ionske baterije D1 spojene su tri baterije 18650. Cijeli krug ima “zajedničku masu”, na koju je spojen izlaz P-kontrolera D1. Izlaz P+ je preko osigurača FU1 i sklopke SW spojen na ulaze DC/DC pretvarača D3 i D4. Pretvarač D3 stvara napon za motore, D4 - za napajanje cjelokupne elektronike. Izlazi ovih pretvarača spojeni su na pokretač motora D5, na koji su spojeni motori. Motori ML1, ML2 s lijeve strane spojeni su na MA kanal, a MR1, MR2 s desne strane su spojeni na MB kanal. Pogon je dvokanalni, što znači da će biti moguće upravljati dvije grupe motora (kanali A i B), ali ne pojedinačno za svaki motor. Priključci ENA, ENB, IN1-IN4 dizajnirani su za kontrolu brzine i smjera vrtnje motora. Otporni sklop koji generira napon Vbat' odabran je tako da u rasponu od 0 ... 5 V formira telemetriju napona Vbat baterije. Ako je Vbat = 13V (što ne bi trebao, budući da baterija može isporučiti maksimalno 12,6V, ali ja sam malo siguran), tada je Vbat' = 3,94V (to jest, vrijednost zajamčeno neće prelaziti granica od 5V). Struja koja teče kroz otpornički krug na 12 V bit će 3,6 mA, a smatrao sam te gubitke prihvatljivim (oko 0,1% s kapacitetom baterije od 3000 mAh). Utičnica za vanjsko napajanje spojena je na ulaz kontrolera D1. Ali, iz dijagrama vidimo da je spojen preko releja D2.
Prvo, želim objasniti prisutnost otpornika od 10 kΩ, koji povlači jedan od pinova u konektoru za napajanje na napon od 5 V. Imamo konektor za napajanje s tri izlaza. Par izlaza nosi napon napajanja. Treći izlaz je informativni. Kratko se spaja na negativni izlaz (mi smo spojen na masu) ako nema utikača u utičnici i otvara se ako je utikač utaknut u utičnicu. Tako dobivamo Vinon' telemetrijski signal o priključku napajanja: ako je Vinon' = 0, onda vanjsko napajanje nije priključeno, ako je Vinon' = 5 V, priključeno je. Otpornik od 10 kΩ povlači ovaj izlaz do 5 V. Kada je utikač spojen, struja od 0,5 mA će teći kroz otpornik, što je sasvim prihvatljivo.
Kada je vanjski izvor spojen preko normalno zatvorenog releja D2 i osigurača FU1, baterije će se početi puniti. Normalno zatvoreni relej znači da su njegovi izlazi uvijek zatvoreni i otvoreni samo kada je napon doveden na kontrolni kontakt. Zašto relej D2? Recimo da nemamo ovaj relej. Ako je napajanje bilo spojeno na platformu, ali ste ga zaboravili uključiti u utičnicu - kako ploča mikrokontrolera zna da li se baterija sada puni ili ne? Što ako je napajanje uključeno u utičnicu, ali ne proizvodi napon? Ili sve radi, ali napajanje daje samo 10V umjesto potrebnih 12V? A, ako sam takav izvor (koji daje samo 10 V) spojio na bateriju koja još nije potpuno ispražnjena i daje 11 V, kako onda da znam - tih 11 V čini bateriju (koja zapravo ne daje izvan iznad 10V) Ili vanjski izvor? Za takve situacije osmišljen je algoritam za koji je bio potreban relej. Naučit ćemo o povezivanju vanjskog izvora napajanja Vinonovom telemetrijom. Isključite relej i pogledajte Vin' telemetriju. Ako odgovara i ovaj napon je u očekivanom rasponu, uključite relej i signalizirajte proces punjenja. Ako nismo zadovoljni, ne uključujemo relej i signaliziramo kvar. Neka se procesom analize i indikacije pozabavi upravljačka ploča, a ne platforma. Da bismo to učinili, dat ćemo mu sve potrebne napone i kontrolni signal za Vinoff 'relej. Upravljački ulaz relejnog modula povlačimo kroz otpornik od 10 kΩ na 5 V, osiguravajući da je relej stalno uključen. Primjena 0 V na ovaj ulaz će deaktivirati relej.
Ali zašto, upravo, pretpotopni mehanički relej? Uostalom, možete staviti MOSFET tranzistor. Postojala je takva ideja, ali je trebalo odustati. Moderni MIS tranzistori imaju nizak otpor (desetke milliohma) u otvorenom stanju i kada teče struja od 2-5 A, na njemu neće biti jako značajnog pada napona i, kao rezultat toga, zagrijavanja - samo kućište tranzistora može rasipaju malu količinu snage čak i bez radijatora. Ali ovo je sve o shemi u kojoj će takav digitalni ključ kontrolirati spajanje izvora napajanja na pasivno opterećenje. Tranzistor stavljamo između dva izvora, zbog čega razlika napona između odvoda i izvora može biti značajna, što će dovesti do povećanog odvođenja topline i tranzistor će se jako zagrijati. Također, da biste otvorili ili zaključali tranzistor, morat ćete napraviti upravljački krug (driver), jer je razina upravljačkog napona s ploče mikrokontrolera 5 V, što nije dovoljno za stvaranje razlike napona između vrata i izvora za upravljanje tranzistorom. (za upravljanje tranzistorom, na primjer, IRFZ44N, morat ćemo primijeniti 8-12 V na njegova vrata kako bismo ih otvorili). Bilo da se radi o gotovom relejnom modulu, koji samo trebate spojiti i koji će, ako je već zatvoren, zajamčeno bez problema spojiti izlaz na ulaz.
Tako smo dobili ne samo sklopnu ploču, već i punopravnu napojnu ploču. Ploča je opremljena DC/DC pretvaračima, otpornim krugovima, osiguračem i hrpom konektora za spajanje elektronike. Strukturno se mogu razlikovati dva konektora. Konektor CON1, na koji će se spojiti baterija, prekidač / tipka za napajanje, konektor za napajanje, relejni modul, motori, upravljačka ploča motora - sve periferne jedinice unutar platforme. I konektor CON2, čija je svrha spajanje na upravljačku ploču. Ovaj konektor daje telemetrijske i upravljačke signale, napon od 5 V, a također je korisno "izbaciti" napon iz Vbat baterije - dajemo mogućnost organiziranja vlastitih kanala napajanja s različitim naponima, na primjer, 6 V za napajanje servo.
Elektronika šasije
Elektronika je odabrana paralelno s razvojem električnog kruga uređaja.
Utičnica s prekidačem je krenula na posao iz primljenog kompleta za kućište. Odabrani su i kupljeni drajver za motore baziran na čipu L298N, ploča DC/DC pretvarača XL4005, neimenovani relejni modul, pretinac za baterije i sklopna ploča dimenzija 50x70 mm i razmaka rupa od 2,54 mm.
Osim toga, trebat će nam i sljedeći materijali.
Na vrhu fotografije možete vidjeti nekoliko dugih pin konektora s nagibom od 2,54 mm, kao i utičnice, ispod - metalni kontakti na kabelu, lijevo - utičnice za njih, desno - M2 vijci, matice i podloške. Priključci na ploči i kabelu u različitim trgovinama nazivaju se različito. Iz povijesnih razloga, pin zaglavlja zovem PLS, utičnice na ploči - PBS, konektore na kabelu - BLS. Na internetu, na stranim stranicama, takvi se konektori traže upitom poput "2,54 mm konektor" ili "dupont konektor". Osim toga, trebat će vam razni potrošni materijal - lem, fluks, žice i tako dalje, kao i set ručnih alata - rezači žice, pincete, odvijači itd. - oni koji rade barem nešto DIY (uradi sam - Uradi sam).
Prije naručivanja elektronike i kućišta shvatio sam da bi odabrana elektronika bez problema stala u unutrašnjost. Vrijeme je da to provjerite: sređujemo elektroniku i označavamo buduća sjedala.
Sada krenimo s pripremom ploča.
Počeo sam s baterijom. Kontroler litij-ionske baterije "posađen" je na ljepilo za topljenje i na njega su zalemljene stezaljke kontakata u skladu sa dijagramom spoja. Mislim da će čitatelje zanimati što se radilo i kojim alatom, pa sam na kraju članka, ispod spojlera, uz svoje kratke komentare stavio slike neke od korištenih uređaja. Ljepilo za topljenje naneseno je termičkim pištoljem. Međutim, prije toga sam morao poraditi na, da tako kažem, povećanju pouzdanosti ovog odjeljka. Upozorit ću sve koji će nešto poduzeti - bolje je da ne pogriješim i uzmem trajnije pretince za baterije. Takve pregrade svojedobno nikako nisam mogao naći u maloprodaji, a kad sam ih našao, zabio sam ih puno od veselja, za jednostavnost duše. I nije im tako lako. Jer u ovom odjeljku baterije s ravnim pozitivnim jastučićima koji ne strše jednostavno ne dopiru do kontakta. Osim toga, svi kontakti s oprugom se okreću, kontakt je loš. Stoga sam morao zašrafiti M2 vijke, odgristi višak, zašrafiti matice i zategnuti kako bih poboljšao kontakt. Ali ovo mi se činilo nedovoljno, a također sam temeljito zalemio sve priključke. Jer ako se nešto radi, onda mora biti pouzdano da ne bi stvaralo probleme u budućnosti i onda se više na ovo ne vraćalo.
Treba napomenuti da se za litij-ionske baterije koristi konvencionalni kontroler bez balansiranja. To znači da kada se jedna od tri baterije puni, kontroler će najvjerojatnije prekinuti punjenje svih baterija. Zapravo, ovo je samo zaštitna ploča od slabog pražnjenja i prekomjernog punjenja baterija i kontrole struje pražnjenja. Stoga je poželjno koristiti baterije istog stvarnog kapaciteta. Ako koristite kontroler s balansiranjem, tada je odabir po kapacitetu manje kritičan i baterije će se koristiti učinkovitije, ali takvi su kontroleri skuplji i zauzimaju više prostora. Kako odabrati baterije istog stvarnog kapaciteta? Uostalom, nakon što ste kupili iste baterije iz iste serije, čak i od marki, kapacitet se može razlikovati za 5-10%, a kineske baterije s natpisima od 6000-8000 mAh, općenito, su baterije nepoznatog kapaciteta. Za mjerenje stvarnih kapaciteta koristio sam punjač OPUS BT-C3100 koji je dosta popularan u mom okruženju. Pomoću njega je provjereno 12 kupljenih baterija i odabrana tri, čiji je raspon kapaciteta minimalan i ne prelazi nekoliko posto. Kapacitet baterija LG LGABC21865 deklariran je na 2800 mAh, ali je u stvarnosti kretao u rasponu od 2400-2500 mAh (testirano na struji od 700 mA).
Mala digresija u obliku refleksije. Punjač nam je izračunao kapacitet baterija, uzimajući u obzir njihovo punjenje do 4,2 V i pražnjenje, ako se ne varam za OPUS BT-C3100, do 2,8 V. U našem slučaju baterije se ne bi trebale manje prazniti od nominalne vrijednosti od 3,5-3,7 V. To jest, naš radni kapacitet baterija je puno manji od izmjerenog. To se mora uzeti u obzir. Možda je u budućnosti vrijedno razmisliti o bateriji od četiri baterije. Je li moguće jednostavno zamijeniti bateriju i napajanje za punjenje? da pogodimo. Dobit ćemo raspon napona od 14,4-16,8 V. Pretvarači napona rade s ulaznim naponom do 32 V. Otporni razdjelnici će nam dati raspon napona telemetrijskih signala od 4,3-5,1 V, što je malo izvan gornjeg raspona 0-5 Q. Ali to se može parirati na razini kontrolne ploče - ako je napon telemetrije 5 V, tada će se baterija nakon nekog vremena gotovo napuniti. S druge strane, snizite li napon na motore na 6-7 V, možete više isprazniti postojeći akumulator i učinkovitije koristiti baterije - u tom slučaju trebate podesiti samo jedan pretvarač napona. Na prvi pogled postoji prostor za buduća istraživanja bez ikakve promjene hardvera, a kako točno interpretirati telemetrijske signale ovisno o instaliranom baterijskom paketu - neka se odluči na razini upravljačke ploče, odnosno za sada vi ne mogu razmišljati o tome.
Posebnim kliještima (striperom) skinuo sam izlazne žice iz dobivenog akumulatora i stisnuo ih u metalne kontakte pomoću kliješta za stiskanje (crimper), zalemio ih radi pouzdanosti i stavio plastična kućišta na njih, dobivajući BLS konektore. Za lemljenje je korištena stanica za lemljenje, kao lem je korišten POS-61 bez kolofonija, a kao fluks bez čišćenja FluxPlus NC-D500.
Nakon sastavljanja baterije i ugradnje baterija u nju, neće proizvesti ništa. Ovako je raspoređeno mnogo kontrolera litij-ionskih baterija - onemogućavaju opterećenje u slučaju kratkog spoja, jakog pražnjenja, viška struje pražnjenja. Kako biste "resetirali" zaštitu i doveli bateriju u radno stanje, morate primijeniti 12-12,6 V na +P / -P kontakte. Isto se mora učiniti nakon prvog spajanja baterija na kontroler. Nakon toga možete se uvjeriti da jedinica proizvodi napon ako su baterije ispravno spojene na kontroler.
Za punjenje takvih akumulatorskih sklopova postoje izvori napajanja s izlaznim naponom od 12,6 V (3x4,2 V). S takvim napajanjem baterije će se učinkovitije koristiti iako se mogu koristiti i izvori napajanja od 12 V. Takav izvor napajanja već imam od 12,6 V i struje 5 A. deklarirao je karakteristike. Najjednostavniji test je test nosivosti. Za to sam koristio keramičke otpornike od 1 ohma 10W i 4,7 ohma 10W. Nakon što sam sklopio sklop s otporom od 2,5 ohma od takvih otpornika, spojio sam na njega napajanje i izmjerio napon na njegovom izlazu. S nazivnom strujom od 12,6 / 2,5 \u003d 5 A, moje napajanje je dalo 12,6 V - ovo je izvrstan rezultat. Kineski izvori napajanja, na kojima je nešto napisano, poput 12V3A, često počinju "tonuti" za 10-20% pri opterećenju od samo oko 1 A.
Po analogiji su pripremljeni prekidač i utičnica.
Priključni blok je uklonjen iz relejnog modula pomoću sušila za kosu, a PLS kontakti su zalemljeni. Za spajanje ovog modula na napojnu ploču napravio sam žice - ogolio sam, stegnuo i zalemio žice za napajanje (kroz koje će biti spojeni konektor za napajanje i baterija) presjeka od 18-20 AWG. A za kontrolu sam koristio žice koje imam, s tanjim žicama, koje se lako traže pod imenom "Dupont".
Isto je učinjeno i s vozačem motora.
"Noge" su zalemljene na DC / DC pretvarače. Vrijedi spomenuti da su ti kontakti izrađeni od metala koji je dobro lemljen samo aktivnim fluksom. Zatim, umjesto FluxPlus-a, koristim LTI-120, nakon čega slijedi brisanje mjesta lemljenja krpom navlaženom izopropanolom kako bih uklonio ostatke fluksa.
Sada izrađujemo našu ploču s elektronikom. Za početak, dobro je zamisliti općenito kako i što će biti spojeno na ploči. Odnosno, pokušajte nacrtati ploču.
[Power board]
Pogodite gdje sam smislio i "lizao" ovu ploču? Vidimo dva konektora na ploči, dva pretvarača napona. Pojavio se dodatni kratkospojnik (uklonjivi kratkospojnik) koji se može instalirati isključivanjem osigurača iz električnog kruga - to sam učinio namjerno zbog banalnog nedostatka osigurača u vrijeme proizvodnje ploče.
Odlemljenje ploče je prilično zamoran i mukotrpan posao. Koristio sam 18-20 AWG žice za napajanje, 26-30 AWG žice za ostale signale. Čemu matična ploča i gnjavaža s ožičenjem? Jer imamo samo prvi prototip. Nešto se može promijeniti, pa je ponovno lemljenje ožičenja lakše od rezanja staza i lemljenja svih vrsta kratkospojnika na gotovoj tiskanoj ploči. Potrebno je vrijeme za izradu tiskane ploče - uzgoj, izradu maske, kiseljenje, bušenje, kalajisanje, lemljenje - malo je vjerojatno da će to trajati manje vremena nego za izradu ploče s "ožičenjem". Iako će tiskana ploča biti pouzdanija i izgledati profesionalnije.
Iz istih razloga, moduli DC / DC pretvarača nisu lemljeni na ploči, već su izrađeni u obliku uklonjivih modula, idealno, nakon početnog otklanjanja pogrešaka, moraju se dodatno pričvrstiti na konektor, na primjer, ispuštanjem vrućeg ljepila . Nije loše na isti način povećati pouzdanost veze svih konektora. Ali dok imamo prototip, prikladnije nam je učiniti sve uklonjivim kako bismo u procesu budućeg otklanjanja pogrešaka imali slobodan pristup svakom važnom čvoru i olakšali njegovu zamjenu ako je potrebno.
Nakon proizvodnje ploče, potrebno je provjeriti usklađenost primljene sa dijagramom strujnog kruga i dijagramima ožičenja. Pomoću multimetra provjeravam ulaze i izlaze na kratki spoj (bolje je ne "zvoniti" kontakte, već izmjeriti njihov otpor, jer u slučaju pogrešne izrade ili dizajna, na primjer, otpor od sto ohma može se formirati na ulazu, koji možda neće "zvoniti", ali njegova prisutnost bit će pogreška u krugu i može uzrokovati velike probleme), a također provjerite je li sve spojeno kako treba biti unutar ploče.
Nakon provjere prije sastavljanja, trebate biti sigurni da će ploča raditi normalno sa svim povezanim periferijama. Da biste to učinili, prvo morate spojiti bateriju, prekidač za napajanje i okrenuti prekidač. LED diode na pretvaračima napona trebaju svijetliti i ništa neće gorjeti. Dok ništa nije spojeno, potrebno je podesiti izlazni napon pretvarača. Zatim se napajanje isključuje, relejni modul se spaja i napajanje se ponovno uključuje. Tako su svi periferni uređaji povezani korak po korak i pod kontrolom.
Montaža i spajanje platformske elektronike
Elektronika je spremna. Sada ga trebate instalirati. Sjećate se, sjedala elektroničkih ploča su bila označena? Akumulatorskim odvijačem buše se rupe na pravim mjestima. Zatim se poliraju mini-bušilicom s mlaznicom za mljevenje. M2 vijci su uvrnuti u rupe. Podloške se moraju postaviti ispod vijaka i matica. Osim toga, zavrnuo sam drugu maticu - matica za zaključavanje osigurat će pouzdaniju navojnu vezu i smanjiti vjerojatnost odmotavanja. Izrađujemo stroj.
Imajte na umu da je udaljenost između dva susjedna motora prilično velika. Ovo je važna točka na koju vrijedi obratiti pažnju iz sljedećeg razloga. Činjenica je da su odabrani motori bez povratnih informacija. Na njih samo primjenjujemo određenu razinu napona i oni se vrte određenom brzinom. No karakteristike motora mogu se razlikovati, što će zasigurno dovesti do problema u pravocrtnom kretanju. Ako je širenje motora malo i robotom će upravljati samo operater, koji uvijek može ispraviti kretanje, onda to možda i nije značajan problem. Ali ako je širenje značajno ili će robot morati putovati dugu udaljenost "ravnocrtno" u automatskom načinu rada, tada se mora osigurati povratna informacija. Postoji serija GM25-370 motora, identičnog dizajna, na kojima su već ugrađeni Hallovi senzori. Što je? Na stražnjoj strani motora, na izduženoj osovini, pričvršćen je disk, na koji je postavljen magnet, koji će utjecati na Hall senzor. Nakon svake pune rotacije diska, primamo impulsni signal čiji se obrada može podesiti na broj okretaja u minuti. Dakle, naša platforma ima prilično ozbiljne temelje za budućnost: moguće je ugraditi motore s povratnom spregom, spojiti ih na strujnu ploču, koja će napajati senzore na njima, te prenositi telemetrijske signale na upravljačku ploču - upravljački sustav može automatski izjednačava brzinu motora.
Zalemio sam žice na motore u skladu s oznakama na njima - na svakom motoru je crvena točka bila nanesena u blizini jednog od dva kontakta. Nakon što sam dobio motore, provjerio sam ih, ali nisam obratio pažnju na ispravnost ove oznake. Jedan od motora je, inače, došao s brakom i uopće nije skrolao, prodavač mi je ljubazno poslao zamjenu, koja mi je stigla barem mjesec dana. Nakon toga se pokazalo da je jedan od motora imao pomiješane oznake, ali to nije važno - samo promijenite polaritet spajanja ovog motora na ploču za napajanje. Gledajući naprijed, reći ću da se ista situacija dogodila s spajanjem "dasaka" - kada je data naredba "naprijed", kotači na desnoj strani rotirali su se naprijed, s lijeve strane - natrag. To se također ispravlja promjenom polariteta povezivanja željenog kanala pokretača motora na strujnu ploču. Promjena polariteta veze - nema potrebe za lemljenjem ili ponavljanjem bilo čega, samo trebate zamijeniti žice.
Kako bih isključio električni kontakt između elektroničkih ploča i kućišta, izrezao sam plastične ploče od blister pakiranja do dna platforme.
Ugradite bateriju. Plastika je vrlo mekana i doslovno visi ispod glave vijka, čak ni podloška ne spašava, pa sam morao koristiti dugu metalnu ploču.
Svi naši vijci i matice s donje strane malo su smanjili razmak od tla i izgledaju prilično estetski.
Izoliramo dno na mjestima gdje su ugrađene elektroničke ploče. Također smo izrezali i stavili plastičnu traku na metalnu ploču u bateriji kako bismo spriječili čak i grebanje kućišta baterije na glavi vijka, litij je ozbiljan!
Ugrađujemo i pričvršćujemo elektroničke ploče i konektor za napajanje.
Noćna mora, koliko žica ... Povezujemo periferiju na ploču za napajanje.
Elektronika za upravljanje platformom
Kao što razumijete, u načelu, zadatak je završen. Platforma je primljena, sve je ispalo sasvim dobro. Za upravljanje platformom možete koristiti bilo koji mikrokontroler, FPGA, Arduino ploče, Intel Galileo i još mnogo toga.Odabrao sam Arduino Nano ploču, pronašao jeftinu i prikladnu ploču za proširenje za povezivanje perifernih uređaja i bluetooth modula na nju. Osnovna ideja je kontrolirati našu platformu s pametnog telefona putem bluetootha. Ploča za proširenje, sa svojim obiljem kontakata za povezivanje vanjskih uređaja, omogućit će vam besprijekorno povezivanje budućih perifernih uređaja robota u budućnosti.
Sada trebamo dizajnirati i izraditi sklopnu ploču za ovu elektroniku. Napravit ćemo "sendvič": sklopnu ploču na koju je ugrađen bluetooth modul i ploču za proširenje, u koju je, pak, ugrađena ploča s mikrokontrolerom.
U usporedbi s pločom za napajanje, ova ploča je gotovo isključivo prekidačka. U sredini je kabel spojen na 18-pinski troredni konektor, koji povezuje ovu upravljačku ploču s pločom za napajanje. Iz ovog konektora signali se usmjeravaju na željene pinove ploče za proširenje, koji zatim idu na željene, unaprijed odabrane pinove mikrokontrolera. Također, 5 V i Vbat izlaze na odvojene pinove na ploči. Napajanje se dovodi do bluetooth modula na ploči, njegovi Rx/Tx ulazi su spojeni na Rx/Tx ulaze Arduino Nano ploče preko ploče za proširenje. Na ploči se nalazi uklonjiva bipolarna LED dioda, čija je svrha označavanje svih procesa vezanih uz napajanje. LED može oblikovati zeleni i crveni konstantni sjaj, treptati određenom frekvencijom - to bi trebalo biti dovoljno da ukaže na normalan napon baterije, njezino pražnjenje, ukaže na proces punjenja i izvijesti o ispravnosti priključenog izvora napajanja.
Kako se ne bi zbunili što i gdje spojiti, shematski sam nacrtao Arduino Nano ploču i rasporedio signale za nju.
Rx/Tx portove zauzima bluetooth modul koji radi putem UART protokola. Signali IN1-IN4, ako je moguće, spojeni su na digitalne priključke - polaritet ovih signala će odrediti smjer rotacije motora, a ENA / ENB na one portove koji vam omogućuju izdavanje PWM signala - ti signali će postaviti brzinu rotacije motora. Vrijednosti signala telemetrije platforme bit će digitalizirane analognim ulazima A0-A3 Arduino Nano ploče. LED dioda zauzima portove A4 i A5, a povezana je preko jumpera. Činjenica je da su ova dva porta potrebna za jednostavnu organizaciju I2C protokola i, ako nam zatreba, jednostavno možemo ukloniti skakače. LED se također može "baciti" na druge slobodne portove ili spojiti na oslobođene portove A4 i A5 modul za proširenje porta (na primjer, na temelju PCF8574T čipa - osigurat će osam dodatnih digitalnih ulazno/izlaznih portova, modul se kontrolira samo koristeći I2C protokol), upariti čije izlaze i spojiti LED. Kao rezultat ove distribucije veza, sačuvane su mogućnosti besprijekornog povezivanja SPI uređaja, digitalizacije još dva analogna signala, te izlaza do četiri PWM signala (npr. za upravljanje servom). Općenito, želio bih više besplatnih signala, ali njihov se broj može povećati pomoću PCF8574T. Na kraju, možete koristiti drugi Arduino Nano ili ga zamijeniti platformom prikladnijom za tražene zadatke - ovo rješenje u potpunosti pruža određeni minimum.
Također, naša ploča omogućuje jednostavno spajanje na napajanje: postoje kontakti za napajanje od 5 V i napon iz baterije (do 12,6 V).
Vrijedi napomenuti jednu nijansu korištene ploče za proširenje za Arduino Nano. U principu, ploča za proširenje vam omogućuje da na njoj pokrenete Vbat. Na ploči za proširenje je ugrađen pretvarač napona koji snižava ulazni napon na 5 V i njime napaja Arduino Nano ploču, čiji pretvarač snižava na 3,3 V, a taj napon je već uklonjen s Arduino Nano ploče i distribuiran na odgovarajuće kontakte ploče za proširenje. Međutim, nisam to učinio i doveo sam 5 V na odgovarajući pin ploče za proširenje. Osim toga, kontrolna LED dioda na ploči za proširenje uopće nije zasvijetlila ako Arduino Nano ploča nije instalirana, odnosno ova ploča za proširenje bez Arduino Nano-a, po svemu sudeći, zapravo ne radi. Nisam razumio razloge, ali sam primijetio ovu točku.
Izrađujemo ovu kontrolnu ploču.
Na njega postavljamo elektronske ploče.
Pripremamo sjedala za našu naknadu. Ugradite prekidač u isto vrijeme.
I skupljamo sve.
Sada morate napraviti kabel za spajanje dvije ploče. Također lemimo priključke za napajanje radi pouzdanosti. Ispravno i vrlo pažljivo provjerite sve. 12 V bi trebao doći do 12 V, a 5 V na 5 V. Slike strujnih i upravljačkih ploča pokazuju "pogled odozgo", odnosno, ako okrenete ploče, zatim na donju stranu za lemljenje ploče, kontakti su obrnuti - to je potrebno uzeti u obzir pri izradi kabela i prosljeđivanju odgovarajućih žica u njemu. Napravio sam konektore jednostavno: prvo je upisan niz žica s BLS konektorima i omotan 2 puta trakom. Zatim su sva dva / tri reda skupljena i ponovno čvrsto omotana trakom. Ispalo je cijeli i monolitni konektor. Neiskorišteni pinovi konektora jednostavno su postavljeni plastičnim BLS konektorima bez pinova.
Nakon izrade kabela, sve elektroničke ploče se skidaju s upravljačke ploče, te se provjerava multimetrom na isti način kao i strujna ploča. Upravljačku ploču spajamo na ploču za napajanje i primjenjujemo napajanje. Pomoću multimetra pažljivo provjeravamo kontakte napajanja svih modula, zanimaju nas naponi telemetrijskih signala - još jednom se uvjeravamo da je sve ispravno ožičeno. Ne morate to raditi, samouvjereno sve sastavite, uključite napajanje i otkrijte da su na neki, naravno, mističan način, žice od 5 V i Vbat pomiješane i Arduino ploča i bluetooth modul izgorjeli. Ali bolje je ne ponavljati tuđe greške.
Na fotografiji možete vidjeti da je jedna od crvenih žica za napajanje obojena srebrom. Ovo je oznaka vodiča koji prenosi napon Vbat. Kada je uređaj sastavljen, korisno je napraviti "ključeve" za spajanje. Na primjer, nemojte posebno lemiti jedan PLS kontakt na konektoru i pokvariti recipročnu utičnicu u kabelu ili je začepiti komadom izolacije - u ovom slučaju se implementira "zaštita od budale", jer se tada takav kabel može samo instaliran bez grešaka na odgovarajući konektor na ploči, jednostavno zato što se inače neće instalirati (metoda ne daje 100% jamstvo - internet je pun slika kada posebno uporni pojedinci nekako uspijevaju zaobići takvu zaštitu koristeći zavidnu upornost i njihova izuzetna snaga). Obično obojim odgovarajuće pinove na konektorima. Bilo bi korisno na ovaj način označiti ulazne konektore DC/DC pretvarača na napojnoj ploči i obojiti odgovarajuće utičnice na ploči. To bi eliminiralo pogrešnu ugradnju pretvarača, a ako koristite više boja, to će eliminirati zbrku ploča pretvarača koje čine 5 V i 9 V. Za identifikaciju se može koristiti svijetli ženski lak za nokte. Ovo malo pravilo uvelike pomaže kod čestog sastavljanja / rastavljanja uređaja koji se razvija u fazi otklanjanja pogrešaka i testiranja.
Spojite kabel na ploču za napajanje.
Vratio bih se nakratko na početak članka, na trenutak kada smo platformu podijelili na dva dijela i "zasebno" izvadili upravljačku ploču. U to vrijeme to se činilo kao vrlo uravnoteženo rješenje. Međutim, gledajući obilje pinova na Arduino ploči za proširenje, shvaćamo da se dobra polovica ovih pinova ne može koristiti u trenutnoj implementaciji platforme - zauzeli smo gotovo polovicu I/O konektora na Arduino ploči . I sam mikrokontroler "uvija" ne samo program za izdavanje para PWM signala motorima, već pruža potpunu kontrolu nad unutarnjim i vanjskim napajanjem cijele platforme. Vrijedi razmisliti - možda je vrijedno uključiti mikrokontroler u motorni prostor naše platforme? Bluetooth "daj" "nadplatformskoj" elektronici koja će upravljati uređajima robota, te razmisliti o spoju sučelja s njim. Možete organizirati UART protokol (trebat će dva pina mikrokontrolera) kroz koji će se prenositi paket podataka koji sadrži smjer i brzinu rotacije motora, kao i opće stanje platforme... I trebate da dobro razmislimo o dizajnu, budući da nemamo puno mjesta u motornom prostoru ... Iako ... Ako rasporedite i pomaknete relej ...
E, tu je kraj moje duge i ponekad dosadne priče. Samo je “hardver” – hardver platforme – razvijen, proizveden i sastavljen. Sljedeći dio posla je softver. Ali to ne znači da će samo programer morati dalje raditi. U procesu stvaranja firmwarea za mikrokontroler i njegovog otklanjanja pogrešaka, ponekad morate uzeti multimetar, ili čak osciloskop, i shvatiti koji signal, gdje i u kojem obliku dolazi. Obično se na početku ove faze, u većoj mjeri, pojavljuju pogreške i previdi faze „željeznog“ projektiranja. Naš je uređaj vrlo jednostavan, pa ako nešto ne radi, pogreška će se brzo pronaći. Možete li zamisliti kako je raditi sa stvarno složenim sklopovima? Tu morate biti mnogo oprezniji i točniji. Također će biti potrebno organizirati kontrolno sučelje putem bluetootha s pametnim telefonom - kako bi se smislio nekakav protokol za informacijsku interakciju između robota i telefona. I razviti softver s kojim je udobno i praktično upravljati robotom. Ali ovo je sve druga, zasebna priča.
Neki od korištenih alata i opreme
Bosch olovka za ljepilo. Pištolj za ljepilo. Prema Bosch terminologiji - ljepilo. Odlično mobilno rješenje. Radi na 18650 bateriji, odnosno neće biti problema s zamjenom u budućnosti, a tu se više nema što kvariti. Brzo se zagrijava (15 sekundi) i spreman je za rad, nakon gašenja gotovo odmah prestaje raditi - ljepilo ne teče iz njega kao kod ostalih termo pištolja. Našao je primjenu u svakodnevnom životu i rukotvorinama. Jedini negativ su ne tako uobičajeni štapići ljepila: 7 mm, visoka temperatura 150 ... 170C (prikladni su štapići DREMEL GG01 i GG03).
BRUTO 17718. Alat za skidanje (striper). Potpuni analog poznatog modela KBT WS-04A, koji su mnogi proizvođači donirali 1-u-1.
HT-202A. Alat za stiskanje žica s kontaktima konektora (krimper).
Solomon SL-30. Pouzdana stanica za lemljenje. Napon napajanja lemilice 24V. Poniklani vrh. Precizna kontrola temperature.
SAIKE 8858. To je također Element 8032. Također je Yihua 8858. Također je ZHaoxin 858DH. Postoje varijacije između ovih modela, ali izvedba, grijači i elektronika su isti. Dobra, praktična, jeftina i stvarno kompaktna sušilica za lemljenje. Kupio sam ga na uvoznom mjestu, s naknadnim usavršavanjem jeftine kineske industrije: istresao bilo koji metalni (!) Otpad, oprao fluks, lemio kontakte na ploči, triac za napajanje je stavljen na KPT8. Dok zadovoljan, fen je kao fen, puše, temperatura i brzina puhanja su podesivi. U principu, sušilo za kosu opravdava svoj novac. Relativno nedavna kupnja i statistika o pouzdanosti još uvijek je nejasna, ali pretpostavljam da će poslužiti za rijetke radove.
Metabo BZ 12SP. Vrlo stari odvijač. Rijetkost. Ove vjerojatno više nisu na prodaju. Omogućuje vam prilično fini rad zbog dobrog centriranja i izostanka vretena.
Velleman VTHD02. Mini bušilica. Ili kako se još naziva - dremel (iako je to netočno na isti način kao što se kopirke nazivaju kopirke). Nakon što je kupljen set za promociju, više mi je laskao set mlaznica nego sama bušilica. Međutim, pokazalo se da je s profinjenošću prehrane prilično dobro. Radi iz matičnog napajanja, ali pod opterećenjem joj je nekako teško. Prije otprilike dvije godine, naravno, isključivo privremeno, napravljeno je mobilno napajanje iz pretinca za četiri 18650 baterije s podesivim izlazom. Minidrill je postao autonoman. S takvom snagom, minibušilica se počela osjećati puno bolje i pokazala se kao vrlo koristan uređaj u kućanstvu.
Noble NB4000P-4. Multimetar. Zgodno je da se žice u potpunosti uklone unutra. Stečena tijekom teških studentskih godina. Odnosno, dugo vremena. Žice su se davno prekinule - morao sam "operirati" s još jednog propalog multimetra. Sada su žice nestale. Baterija i osigurač su mijenjani nekoliko puta. Do sada radi - nevjerojatna pouzdanost s osrednjom točnošću.
Fluke 179. Multimetar visoke preciznosti. Visokokvalitetan, praktičan i, što je najvažnije, precizan alat.
Primljeno kao reklama. Iako… zašto ne – gdje je onda moja provizija? Svi ovi alati služe za općenite informacije. Svojedobno sam, primjerice, otkrio striptizete koje proces skidanja žica iz rutine pretvaraju u užitak i uopće ne žalim što sam kupio BOSCH GluePen. Možda će ovaj mali izbor nekome pomoći.
Za sastavljanje vašeg robota uopće nije potrebno imati raznovrstan i skup alat, iako svakako poboljšava kvalitetu rada i donosi više zadovoljstva. Dovoljno je imati obično lemilo, nekoliko odvijača i bušilicu. Na kraju, nekoć je autor ovog članka, davno, imao samo kliješta, čekić, par odvijača, bakrenu žicu, podupirač (još negdje!) i dvije bušilice, komade telefonskih žica i puno plava električna traka (često - ranije korištena), to je bilo sasvim dovoljno da se napravi najjednostavniji automobil, koji je, kada se pritisne gumb, išao ravno sam od sebe.
Glavne komponente
Po popularnom zahtjevu čitatelja, dajem linkove (ebay/aliexpress) na glavne komponente. Linkovi rade od rujna 2016. Sve je naručeno prije šest mjeseci (veljača-ožujak 2016.), pa preporučam da pogledate dodatno - možda sada možete kupiti po povoljnijoj cijeni.
Šasija, motori, kotači, pričvršćivači - platforma (izbor u dvije boje) + 4 * (točak 80 mm + pričvršćivači + motor (izbor od tri brzine))
Obratite pažnju na sljedeći set - kotač od 130 mm + pričvršćivači + motor s Hall senzorom
Obratite pažnju na kapacitetne baterije (radio sam s njima nekoliko puta - ove baterije obično imaju isti stvarni i deklarirani kapacitet, tj. stvarno imaju 3400 mAh!) - Panasonic NCR18650B 18650 / 3400 mAh / 3.7V / nezaštićeni HC Module 5
0.9% Strašno - gdje je tu kultura govora, normalna konstrukcija rečenica... autor treba naučiti sintaksu, i morfologiju! 2
5.9% Teško mi je odgovoriti ili objasniti u komentarima. 12
« Šasija za robota za 200 rubalja
Svaki robotičar, koji počinje stvarati robota, razmišlja o tome šasija. Ovdje je briljantna ideja proizvodnje sa svojom jednostavnošću i niskom cijenom šasija robota od kineskih automobila.
Da bismo stvorili šasiju, trebamo dva najodvratniji kineski tenkovi igrački na električnu vuču. Ne moraju se uopće moći okretati - puno je jeftinije.
Ružnoća ima dvije prednosti: nisku cijenu i nedostatak sažaljenja tijekom analize spremnika.
Kako ideje upozoravaju, takvi jeftini izdanci kineske industrije smrde kao pakao, pa neće biti šteta.
Dakle, imamo donatorske tenkove. Ići!
Uklanjamo poklopce s donorskih spremnika.

Pretinci za baterije su nam i dalje korisni, pa ih jednostavno očistimo od viška plastike.

Trebat će nam oba odjeljka (iz svakog spremnika).

Zalijepite odjeljke za baterije zajedno.

Odgrizli smo i otpilili osovine do samih mjenjača kako bismo iz jednog šasije tenka dobili pola šasije za robota.

Dva zupčanika koji se koriste za okretanje njuške uklonjeni su kao nepotrebni.
Hvala ArtemKAD-u na shemi (vidi forum).
Format: pdf, veličina: 13Kb
Ako masa robota raste, bolje je koristiti snažnije motore. Jedno od provjerenih rješenja su obični motori iz električnih prozora.
Format: jpg, Veličina: 33Kb
Zgodan LPT drajver, s primjerima njegove uporabe u Delphi projektima.
Format: zip, Veličina: 31Kb
Radni, sastavljeni i ispitani krug. Također su prikazani pinout dijagrami i izgled detaljima.
DPM-30 je reverzibilni DC elektromotor. Koristi se u vojnoj radio opremi (radio relejne stanice, itd.) za podešavanje kontura sustava za automatsko podešavanje. mala veličina dovoljno moćan.
Dužina kućišta - 5,6 cm.
Puna dužina - 7 cm.
Promjer kućišta - 3 cm.
Nominalni napon napajanja je 24 ... 27 V. Međutim, radi prilično pouzdano na 12 V, uz pravi gubitak snage. Međutim, upravljački stroj robota će učiniti.
Potrošnja struje - u području od 0,1 A.
Format: jpg, Veličina: 25Kb
Kostur robota uzima se kao prvi sloj. Straga je na pravokutni kvadratni okvir baze pričvršćena šasija: kotači opremljeni motorima. Sprijeda je postavljen trokutasti okvir upravljačkog mehanizma. Unutar okvira, na podu od šperploče, nalazi se baterija i dvije ploče: pretvarač napona i uređaj za upravljanje motorom. Na uglovima potpornog okvira postavljene su okrugle baze za police. Pretpostavlja se da je gornji okvir uklonjiv (radi lakšeg pristupa šasiji i elektroenergetskom sustavu u prvom sloju).
Format: jpg, Veličina: 93Kb
Dijagram je preuzet iz Heizermanove knjige, iz legendarnog Bustera. Regulacija brzine se vrši primjenom pravokutnih signala različitih radnih ciklusa na ulaze ploče. U Busteru se to kontrolira posebnom shemom kontrole brzine, ali se može uspješno emulirati pomoću LPT porta.
Format: jpg (nekoliko slika)
Najjednostavnija shema upravljanja pogonom. Četiri dolazne žice iz LPT priključka upravljaju upravljačem da se okreće udesno ili ulijevo, a pogonskim motorima da se okreću unatrag ili naprijed.
Format: jpg, Veličina: 51Kb
Blok dijagram upravljačkog mehanizma budućeg robota. Korišteni: okvir nosača, motor, povratni senzori, radi na bazi sklopa računalnog miša.
Format: jpg, Veličina: 30Kb
Priključite na korištenje LPT priključka. Prikazani su primjeri shema za povezivanje vanjskih uređaja na ovaj port, najjednostavnija verzija teksta programa za testiranje.
Format: html
 Lako sam zapamtio riječi, ali izgovor s glavom odao je moj Angarsk")



















 kada se motor pokrene i zašto se gasi (ponovno pokretanje")












